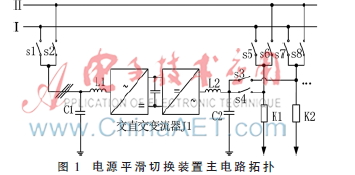
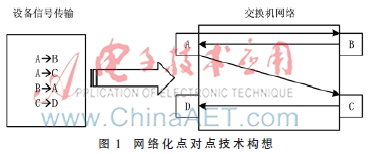
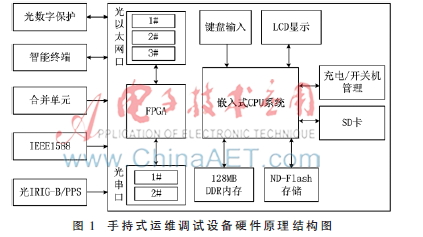
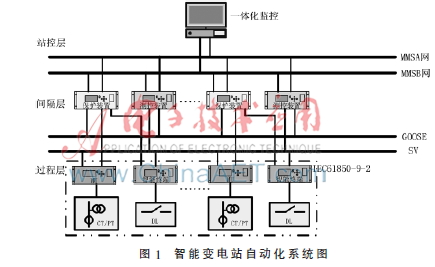
设计应用 基于电力电子变流器的电源平滑切换装置[电源技术][智能电网] 为了解决电力负荷的电源在切换过程中存在的短时停电、电流及电压冲击等问题,本文设计了一种基于电力电子变流器的电源平滑切换装置。装置充分利用了灵活的电力电子电能变换技术,通过变流器并网-离网-并网-脱离的过程,完成旧电源到新电源的不停电、平滑切换。该装置可以用于变压器间负荷的转移以及调节三相不平衡负荷。 发表于:2016/3/27 下午9:12:00 智能变电站网络化点对点信号传输技术应用[通信与网络][通信网络] 在智能变电站中,间隔层和过程层的信号传输问题一直是智能变电站建设过程中需要面临的首要问题。文章结合行业的相关要求,总结了该问题的现状,并比较、分析了点对点和网络化两种主要应用方案的优缺点,提出了网络化点对点的解决方案。该方案对交换机在智能变电站中的应用进行了重新定义,同时针对几个关键问题介绍了该方案的具体实现方式和实现逻辑,同时提出了具体的产品实施方案。最后结合该方案特点,针对现场工程应用提出了建议。 发表于:2016/3/27 下午8:48:00 大数据时代电力企业的发展探析[模拟设计][智能电网] 数据等新技术通过从堆积如山的数据中,快速获得有价值的信息,为企业提供了新的增长机遇,另一方面电力行业近年来的发展速度逐步放缓,其持续发展需要新的驱动力和突破点,以达到精细化、规范化、标准化管理的目的,本文针对电力行业现有掌握大量电网数据和用户数据的现状,分析大数据在网络运维、客户服务、市场营销和资源调配等关键环节对未来的影响与发展。 发表于:2016/3/27 下午8:39:00 智能变电站手持式运维调试设备的研究[电源技术][智能电网] 本文首先分析了智能变电站与传统变电站之间的差异,以及智能变电站发展趋势、运维内容和功能需求;其次,针对智能变电站的这些特点,从功能、硬件、软件实现几个方面介绍了一种便携手持式智能变电站运维调试设备的研制,该手持运维调试设备集成了SV、GOOSE发送及接收监测等多种实用功能。经智能变电站的现场调试,该设备支持跨间隔移动检修,现场适应能力强,符合当前智能变电站运维调试设备轻型化、多功能化的需求。 发表于:2016/3/27 下午6:38:00 基于存储器映射的Flash高速低功耗驱动实现[可编程逻辑][数据中心] 针对高速大容量Flash芯片控制中面临的高速可靠性不高与动态功耗大的问题,研究了一种将复杂状态机操作映射到内嵌RAM上运行的方法。通过对内嵌RAM读地址的切换,实现了等延时的状态跳变与输出控制。同时采用加强时钟管理、分割组合逻辑来避免信号不必要的翻转,极大地提高了时序运行的可靠性并降低了其动态功耗。实践表明,该方法实现的Flash控制时序比传统的状态机在资源消耗和功耗方面均能降低50%以上,为复杂时序逻辑的实现提供了一个新思路。 发表于:2016/3/25 下午3:36:00 基于FPGA的改进结构的DDS设计与实现[可编程逻辑][航空航天] 主要介绍了数字频率合成器的原理和杂散来源,给出了节约存储空间的ROM表的压缩算法,采用相位抖动和平衡DAC方法对DDS结构进行了改进,抑制了相位截断误差和减小了DAC非理想特性的影响。仿真分析了用于相位抖动的随机序列周期性对杂散的影响,最后基于FPGA平台实现了改进结构的DDS,并对结果进行了测试。测试结果表明DDS用作跳频器时,杂散抑制优于40 dBc。采用此种方法设计的DDS杂散抑制度高,稳定性好,性能优越。 发表于:2016/3/25 下午3:26:00 智能变电站网络压力性能测试研究[通信与网络][智能电网] 目前智能变电站中智能电子设备(IED)的网络测试缺乏充分的测试依据与有效的测试方法。本文对IED设备网络压力的产生机理展开分析,根据不同IED设备的功能特点提出了针对性的网络性能指标。在此基础上,探讨了网络压力测试的基本原则与方法,并研发了一款能够对IED设备网络性能各项指标进行测试的网络测试仪,对智能变电站网络的设计以及压力测试提供了指导性作用。 发表于:2016/3/24 下午9:27:00 直流调速系统的电压暂降设备敏感度研究[嵌入式技术][工业自动化] 电压暂降是目前最重要的电网电能质量问题之一。本文通过直流调速系统的传递函数分析,建立其系统模型,然后对该调速系统的电压暂降设备敏感度进行了研究,分析了该系统对不同电压暂降深度、持续时间的设备敏感度,对转矩、转速、电枢电流等运行特性进行了敏感度研究。最后利用MATLAB仿真,在正常电压、不同电压暂降深度和电压暂降持续时间等三种条件下进行了两类直流调速系统暂降敏感度的数值验证。结果显示,电压暂降会导致电机转速的下降及转矩的扰动,从而影响该调速系统的稳定运行。 发表于:2016/3/24 下午9:12:00 电力企业指标运营监测方法研究[嵌入式技术][数据中心] 国家电网运营监测中心对各业务部门进行指标数据监测的主要根据是业务专家知识和经验[1-2],所以对专家的业务水平有很大的依赖性。本文将数据挖掘的方法引入到电力企业指标阈值设置的研究领域,用时间序列模型反映数据时间变化特征[3-5],用正态分布反映数据的稳定性[6-7],用线性拟合体现数据的线性变化趋势[8],在一定程度上解决了以往设置的阈值缺少客观依据的现状。 发表于:2016/3/24 下午8:55:00 低频振荡分析与在线辨识方法综述[通信与网络][通信网络] 系统互联引发的区域低频振荡问题已成为严重威胁互联电网安全稳定运行的突出问题,需对其进行深入研究,进而找到低频振荡的诱发机理及影响因素。本文结合实际系统特性,介绍了常用的低频振荡分析算法,讨论了各算法的优缺点,分析了各种应用场景下改进算法的特点。广域测量系统的出现为更好地在线监视低频振荡提供了新的技术手段,通过实际工程应用,有效验证了组合分析算法的优越性,最后展望了在线低频振荡辨识发展的应用前景。 发表于:2016/3/24 下午8:46:00 <…450451452453454455456457458459…>