
摘要:将嵌入式系统应用到船舶柴油机电子调速器的控制系统中,提出了采用LPC2129控制的柴油机数字式电子调速器。给出了系统的硬件总体结构设计和软件设计流程。硬件方面阐述了以LPC2129为核心所构建的硬件各组成部分。针对嵌入式系统的特点进行了电子调速器嵌入式控制系统的研究,实现了控制系统中的PID控制算法,实验表明,能克服传统机械式诸多方面的缺点,满足大多数中高速柴油机不同工况下的调速要求。
关键词:柴油机;电子调速器;ARM;PID控制
0 引言
调速器是柴油机自动调节系统的重要部件,它根据柴油机负载的变化自动调节柴油机的供油量,使柴油机的转速保持稳定,从而保证柴油机具有良好的工作性能。目前我国船舶行业大多数柴油机采用的机械式调速器已逐渐不能满足动力设备越来越高的要求。采用电子调速器代替机械式调速器的方法,既能提高柴油机的各项性能,又不至于大幅度提高成本。
嵌入式系统作为一种新的技术发展趋势受到人们的广泛关注,本文将嵌入式系统应用到柴油机电子调速器的控制系统中,介绍一种嵌入式电子调速器的软硬件设计。该调速器是一个闭环控制系统,以LPC2129控制器为核心。转速给定信号和位置反馈信号以及实际转速测量信号经过A/D转换成数字量送入ARM处理器,当实际转速和设定转速不相等时,产生转速偏差,然后对偏差进行PID运算处理,向执行机构输出一个油门开度调节信号,调节柴油机循环供油量,使柴油机按预先设定的转速稳定运转。当设定转速发生变化时,系统能够以同样的方式迅速达到设定转速,改善了柴油机的响应性能。
1 LPC2129的功能及特点
LPC2129是基于一个支持实时仿真和跟踪的16/32位ARM7TDMI—S CPU的微控制器,并带有256 KB嵌入的高速FLASH存储器。128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行。对代码规模有严格控制的应用可使用16位Thumb模式将代码规模降低超过30%,而性能的损失却很小。LPC2129有较小的64脚封装、极低的功耗、多达46个GPIO(可承受5 V电压)。片内独特的PLL环可实现最大为60 MHz的CPU操作频率。12个独立外部中断引脚(EIN和CAP功能),独有的向量中断控制器可配置中断优先级和向量地址。双电源供电,2个低功耗模式:空闲和掉电。同时该芯片丰富的基本外设使得在不同的环境下都能得到高效的应用。
2 硬件设计
2.1 调速系统控制策略
本系统所采用的控制策略,是齿条位置和转速串级控制。其控制策略框图如图1所示。

如图所示内环为位移环,外环为转速环。使用串级控制的目的是为了改善过程的动态性能,能提高控制质量,使系统对负荷变化的适应性较强。这里,转速控制器和位置控制器所采用的都是PID控制算法,并且都是由LPC2129控制器实现。
2.2 统硬件部分
系统硬件设计结构框图如图2所示,分为传感器、控制器、执行器3个部分。

本系统的输入信号有:柴油机实际转速信号、由电位器给出的设定转速信号以及齿条位移反馈信号,均经过信号调理后送入ARM。
选用磁电式转速传感器来测量柴油机实际转速,得出的正弦交流信号经整形电路调理与定宽处理后转换为方波信号,方波信号随后经RC积分电路积分为电压量,电压量的大小与方波的频率成正比,电压量经A/D转换为数字量送ARM。
设定转速信号由电位器给出,其输出信号要经过放大和A/D转换后送ARM处理器。
齿条位移的检测采用角位移传感器,其输出信号也要经过放大和A/D转换后送ARM进行处理。
控制器主要完成调速与控制运算、系统工作状态监测以及与外部PC机的通信联络等功能。是整个系统的核心部分,选择Philips公司的LPC2129芯片。控制器由CPU、外围辅助电路以及串行通讯控制器组成。
调速执行机构的功能是将转速控制器输出的油门开度调节信号转换成油泵齿条的直线位移运动,使柴油主机的转速与设定转速相一致。电动执行器本质上是一个带有内置式制动器的伺服电动机,并且安装在高压油泵油门齿条侧,用以驱动油门齿条。同时,执行器也将齿条位移的信息反馈给控制器,供控制运算和显示用。另外,为了便于与PC机的通信,按RS232标准扩展了串行通信接口。通用异步收发器(UART)是用硬件实现异步串行通信的通信接口电路,LPC2129内部集成了2路UART电路。在电气特性上,RS232标准采用负逻辑方式,标准逻辑1对应-15~-5 V电压,标准逻辑0对应+5~+15 V电压,所以在硬件上UART的TTL电平都需要采用SIPEX的SP3232芯片进行电平转换,才能与RS232接口连接并通信。
3 软件设计
系统控制软件由主控制软件和若干个功能子程序和中断程序构成。其中主程序完成系统硬件芯片的初始化和控制流程的管理。起动、加减速、通讯、故障处理、人机交互等控制过程由相应的子程序完成。但转速、齿条位移等反馈信号的采集、调节等运算、调节量的输出等实时性要求高的环节则必须采用中断控制的方式来实现。
3.1 转速PID调节算法及实现
调速系统中的转速控制采用PID控制算法,由于PID控制器具有原理简单、易于实现、适应性强、鲁棒性强的优点,使其成为柴油机调速系统中应用普遍且效果良好的转速调节方式。其算法如式(1)所示:

式中:U(t),e(t)为调节量和转速偏差量;KP,TI,TD分别为比例增益、积分时间常数、微分时间常数。
3.2 主控制程序
主控制流程图如图3所示。
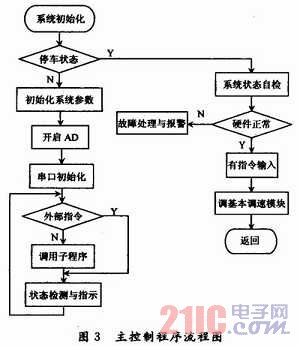
主要完成以下功能:系统上电或者复位后,对硬件芯片进行初始化操作;判断系统复位后的状态,如果是非停车状态,则应该恢复正常的运行状态,否则进入系统状态自检测;通过串口向外部设备发送系统的状态信息,利于观测系统的运行状态;程序自动查询、判断系统的外部指令,并跳转到相应的功能模块完成指定的任务。
3.3 中断服务程序
在中断程序里,采样转速反馈,根据与给定转速的偏差值,进行PID调节运算,根据输出值调节给出相应的齿条限制值。流程图如图4所示。

4 结语
本文将嵌入式系统应用到船舶柴油机电子调速器的控制系统中,介绍了一种基于ARM的嵌入式船舶柴油机电子调速器,以LPC2129为核心的控制系统,给出了总体控制方案和硬件设计包括传感器部分,控制器部分,执行器部分以及与PC机的串行通信,调节转速采用PID控制算法。