
0 引 言
靶机是无人机家族中的一个重要分支,主要用于模拟作战飞机、导弹等威胁目标,为防空武器系统试验和训练提供逼真的空中靶标。随着技术的进步,现代反舰导弹多采取“超低空掠海”飞行的突防方式,与之相应的用于模拟反舰导弹类目标的无人靶机也需要具有超低空掠海飞行能力。20世纪60年代,以美国为代表的西方发达国家推出了第一代具有超低空掠海定高飞行能力的靶机,之后迅速形成了系列化,并随着新技术的应用不断升级换代,某些经典型号至今仍在广泛使用,如石鸡、火蜂、米拉奇等系列靶机,其掠海飞行的相对高度均达到了5 m以下。国内在这一领域则起步较晚。飞行控制系统是无人机的“大脑”,无人机的超低空掠海飞行主要是在飞控系统高度控制器的控制下实现的。因此,本文针对小型靶机飞控系统的研制,基于无线电高度表/加速度计组合控制的基本原理,采用Kalman滤波信号处理方法和基于ARM7微处理器的嵌入式系统,设计了一种简单实用的高度控制器,能够对靶机飞行高度进行精确控制,从而实现超低空掠海定高飞行的目的。
1 飞控系统配置与高度控制原理
靶机飞控系统由传感器、飞控计算机和执行机构3个部分组成。传感器主要包括垂直陀螺、两轴角速率陀螺、三轴捷联式磁航向传感器、无线电高度表、垂向加速度计、空速管、GPS接收机、发动机温度和转速传感器等;飞控计算机是飞控系统的核心部件,是一台基于ARM7的嵌入式计算机,接收来自各传感器的测量信息,并根据控制律进行解算,给出控制信号驱动执行机构动作;执行机构主要包括升降舵机、副翼舵机、舵回路控制器、发动机油门电机和ECU控制器。飞控系统组成如图1所示。

高度控制器主要由内、外两个反馈控制回路构成。首先是以垂直陀螺和角速率陀螺测量信号作为反馈控制信号构成靶机姿态控制内回路(角运动控制系统),包括横向、纵向两个控制通道,是系统的核心控制回路。由于姿态控制系统在常值干扰力矩(如垂风)的干扰下存在姿态角静差,会导致高度漂移,不能直接应用于高度轨迹的稳定与控制,因此在高度控制系统中需要直接测量飞机高度和垂向运动速度等线运动信息,使用高度表和线加速度计等传感器,在姿态控制系统基础上建立高度控制外回路,两者共同构成完整的高度控制系统(图1中阴影部分)。在超低空飞行时要使用高精度的高度传感器,通常采用无线电高度表。在该系统的实际设计中,采取了无线电高度表和线加速度计组合控制,即对无线电高度表和垂向线加速度计测量信息进行特定算法综合处理后,得到靶机高度和垂向速度的两路反馈控制信号,送到纵向姿态控制通道,形成高度控制外回路,与姿态控制内回路共同完成高度控制功能。
2 高度控制律设计
2.1 基本控制律设计
为了减少设计风险,高度控制律采用经典的比例一微分(PD)控制。
其时域表示为:

其控制原理如图2所示。
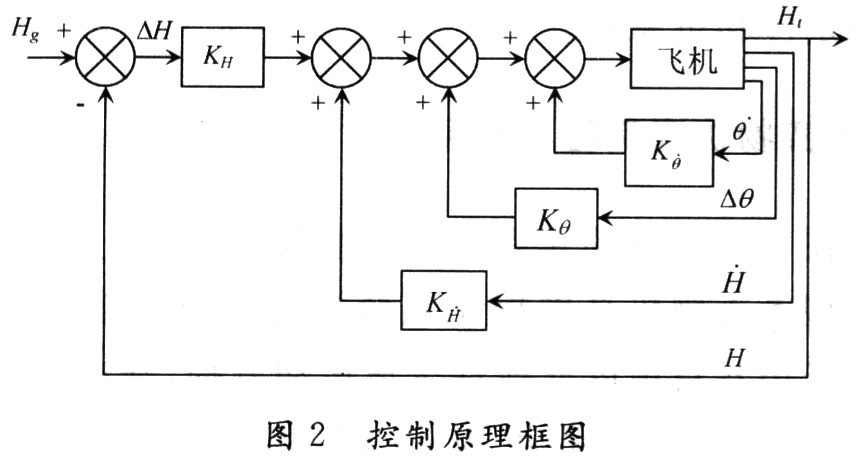
控制量由四部分组成,包括姿态控制内回路和高度控制外回路的各两个控制量。姿态控制内回路:与俯仰角偏差△θ成正比的比例控制器作为主控制对俯仰角进行修正,与俯仰角速率θ成正比的微分控制器主要用于改善姿态内回路的阻尼特性。
高度控制外回路:与高度差△H成正比的比例控制器作为主控制对高度进行修正,与垂向速度冉成正比的微分控制器则主要用于改善高度外回路的阻尼特性。
2.2 信号处理方法及效果分析
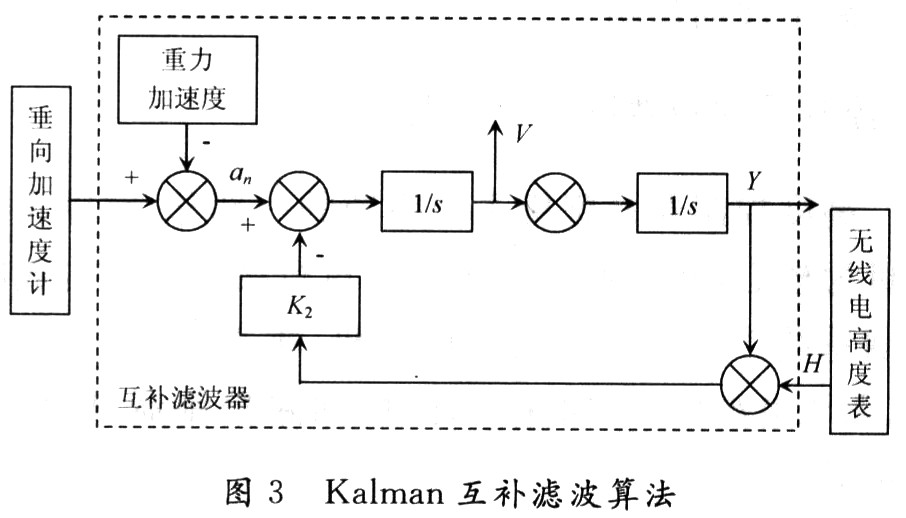
在基本控制律确定后,一个必须解决好的主要问题就是如何获取高质量的反馈控制信号。俯仰角偏差△θ与俯仰角速率θ,按常规做法可分别由垂直陀螺和角速率陀螺提供满足精度要求的信号。这里主要问题在于高度信号H和垂向速度信号H的获取和处理。无线电高度表信号由于海浪起伏等因素的影响本身含有大量的噪声,并且如果直接采用高度表信号微分获取垂向速度信号,会引起系统不稳定,不能单独使用;如果采用加速度计信号积分获取垂向速度信号和高度信号,又存在误差累积的问题,也不能单独使用。然而如果将两者组合使用,则可以产生很好的优势互补效果。所以,本文采用了一种Kalman互补滤波算法,既可滤除高度信号噪声,又可获得高质量的垂向速度信号。其设计思想是通过对垂向加速度信号进行积分得到垂向速度,再对垂向速度积分得到高度,将此高度与高度表的实际测量高度进行比较,得到一个偏差量。把该偏差量作为当前时刻的误差估计值重新加入到垂直加速度和垂直速度上继续进行滤波运算。高度信号与垂向加速度信号互补滤波的原理如图3所示。
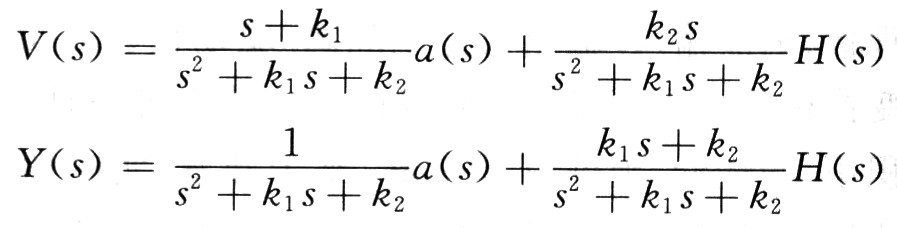
再对该滤波算法的效果进行分析。设拖靶的实际高度为Hr,记a=Hr+Na,其中Na表示加速度的误差,则有:

记H=Hr+Nh,Nh表示高度的误差,则有:
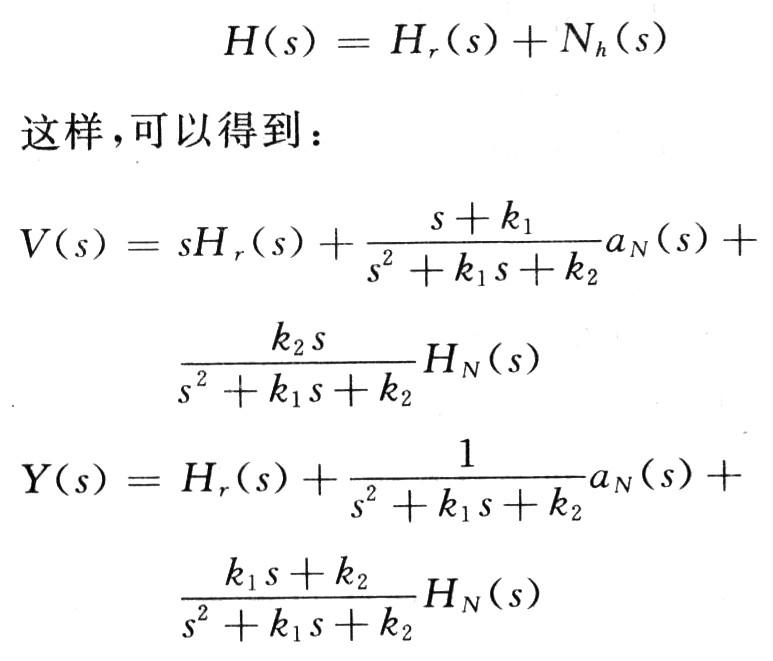
从上面可以看出,解算后的速度V由三个部分组成:
真实高度的微分:sHr(s)
这样得到的垂向速度和高度信号中,加速度误差和高度误差的信号能够被有效地滤波,特别是能够有效地去除海杂波的影响。
3 控制器软硬件设计与实现
高度控制器是靶机飞控系统的一部分,它以飞控计算机为核心,并与各路传感器及执行结构共同构成闭环控制系统。主要由飞控计算机、垂直陀螺、角速率陀螺、无线电高度表、加速度计、舵回路控制器、舵机等设备组成。
(1)飞控计算机
飞控计算机包括主机板、A/D转换板、串行数据通讯接口板、开关量接口板、D/A转换板、模拟输入前置处理板、离散输入/输出及光电隔离/驱动板、DC/DC电源变换板等。采用基于ARM的嵌入式系统设计,具有体积小,功耗低,硬件资源丰富,易于开发,实时性和可靠性好等优势。主机板处理器选用ARM7TDMS-S体系结构的32位LPC2124芯片,其16 KB的内部RAM以及128 KB的内部FLASH存储器,可很好地满足嵌入式实时操作系统RTOS(μC/OS-Ⅱ)的运行要求,保证系统每20 ms能进行一次高度控制律解算。
(2)垂直陀螺
选用TC-3E型垂直陀螺仪,在高度控制回路中主要用于测量飞机俯仰角姿态,工作范围俯仰角为±30°,输出模拟电压信号。
(3)角速率陀螺
选用2轴角速率陀螺,在高度控制回路中主要用于测量飞机俯仰姿态角速度,俯仰角速度输出范围为±60°/s,输出模拟电压信号。
(4)无线电高度表
采用调频/连续波(FM/CW)体制,工作频率为4 200~4 400 MHz,测高范围为0~300 m,高度输出形式为:RS 232串口输出,波特率为38 400 b/s,更新率为50 Hz。
(5)加速度计
加速度计安装在靶机的重心位置,用于测量拖靶的垂直方向加速度,选用ADXL105AQC加速度计芯片,精度为±1~±5 g,单通道模拟输出,分辨率2 mg。
(6)舵回路控制器
基于PWM直流电机驱动器专用集成电路L292设计。包括位置调节器、电流调节器、PWM功放、位置反馈和电流反馈传感器。位置反馈为主反馈回路,采用WDL-25直滑式精密导电塑料电位器;电流反馈采用标准电阻。
(7)升降舵机
采用齿轮减速永磁直流力矩电机,额定转矩15 Nm,额定转速(减速后)4±1 r/min。
(8)软件设计
基于嵌入式实时多任务操作系统μC/OS-Ⅱ下编写应用程序,具有可移植、裁剪、多任务和基于优先级的抢占式任务调度等特点,实时性好,可靠性高。使用实时操作系统(RTOS)是因为可将应用分解成多任务,简化了应用软件的设计,同时RTOS使控制系统的实时性得到保证;良好的多任务设计,又有助于提高系统的稳定性和可靠性。
4 半实物仿真实验与结果
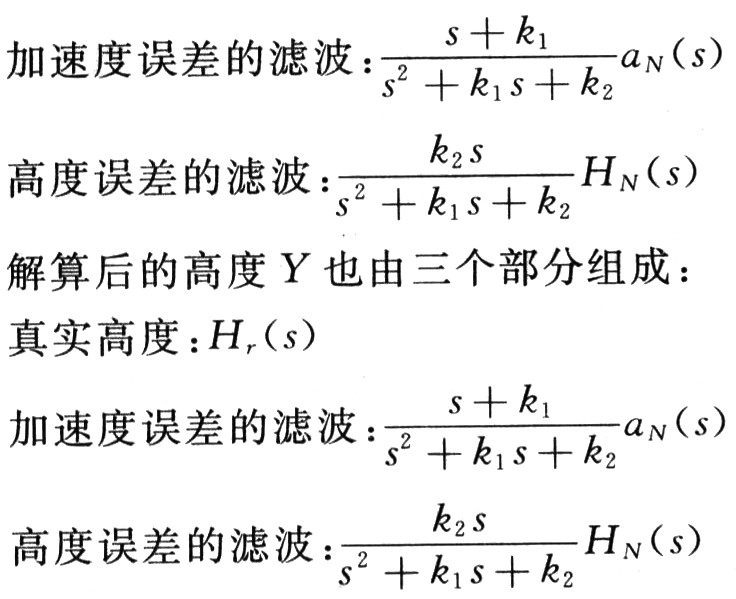
在自行搭建的无人机半实物仿真平台上,对所开发的小型无人靶机高度控制系统进行了仿真验证。飞机模型采用六自由度非线性全量运动方程,基本仿真步长为5 ms,仿真计算精度为64 b(双精度浮点)。仿真系统包括在三轴转台上的垂直陀螺、角速率陀螺,与动静压模拟器连接的空速传感器,而无线电高度表信号、加速度计信号则通过计算机模拟,再接人高度控制计算机、舵机等构成仿真回路。仿真结果如图4和图5所示,本文给出了两种主要干扰条件下的结果。
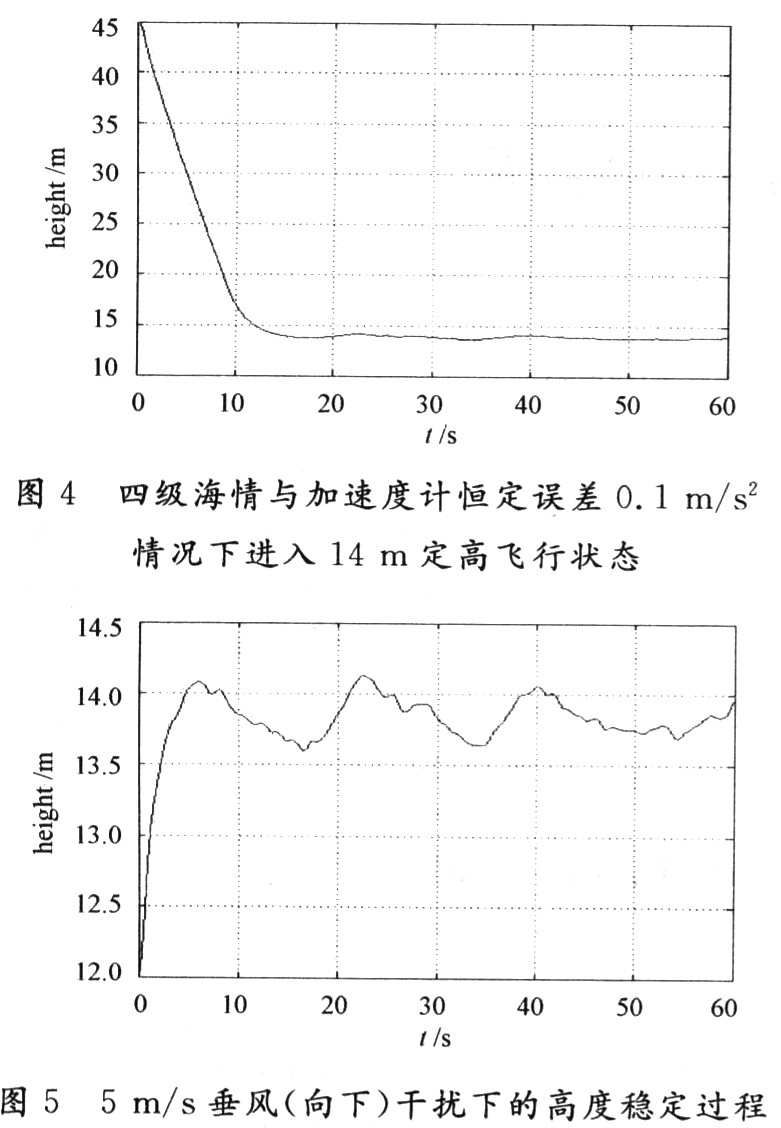
仿真结果表明,在4级海情产生高度表噪声影响和加速度计测量误差影响的情况下,系统能够控制靶机平稳进入14 m定高飞行状态,并按精度要求保持在预定高度飞行。在5 m/s垂风干扰下,靶机能够很快回到预定的14 m基准高度。可见系统静动态响应指标能满足设计要求。
5 结 语
本文基于无线电高度表/加速度计组合控制模式,采用成熟的比例一微分(PD)控制原理,Kalman互补滤波的信号处理方法,以及基于ARM的硬件实现和μC/OS-Ⅱ嵌入式实时操作系统的软件开发,设计了小型靶机超低空掠海飞行高度控制器,其结构简单紧凑,原理可行。半实物仿真实验结果表明,系统具有良好的静、动态响应特性,完全能够实现对靶机超低空高精度掠海定高飞行的控制,系统设计和软硬件实现都是成功的。