
目前普遍使用的物理靶面大多,如图1所示,物理靶面由靶心和以靶心中心为圆心的一系列环线等组成。作为基准,靶面图像中环线的识别和处理直接影响到报靶精度。在报靶精度要求不高的情况下,一般将图像中靶环作为标准的圆来处理。在实际中,由于靶面与光学系统的不垂直及光学系统的畸变,图像会产生相应的畸变,其结果是图像中的环线并非正圆,所以由上述方法算得到的结果存在较大的误差。因此环形靶面由于其固有缺陷,使报靶精度受到较大影响。
在条件允许的情况下,如果对物理靶面进行改造,或者根据实际应用设计物理靶面,往往能够得到更高的报靶精度。文中提出了一种基于点控制的自动报靶系统,该系统采用标识点作为控制点,其相对靶面中心的位置已知,这些点具有已知半径,降低了识别难度,一般的噪声不会对其产生严重影响。采用简单的阈值就可以实现点的分割,大大减小了图像预处理工作,提高了系统的实时性。针对点控制,文中提出了采用距离加权平均法来计算靶数,避免了图像的几何矫正工作,同时保证了报靶精度,系统的通用性也大大增强。
1 靶面设计及系统工作原理
相对于传统方法,基于点控制的自动报靶系统的物理靶面只是在普通靶上增加了一些点,这些点以环线上的点为圆心,那么,从靶心中心点到这些控制点中心的距离就是该控制点所在靶环的半径。每个环线上平均分布着若干个点,圆环半径越小,圆环上的控制点相对也越密集,计算精度也相对越高。图2给出了用控制点对环线进行12等分的靶面示意图。
系统主要分两步来完成报靶工作。首先,在射击前完成对靶面背景图像的采集和处理。通过阈值将各控制点从背景图像中分割出来,由于控制点半径相对很小,图像畸变对其影响很小,可以采用各控制点的重心作为其中心坐标,然后再从这些点中确认出靶心中心。其次,射击完毕后,采集靶面图像,将采集到的图像和背景图像进行差处理,获取弹孔图像,求取弹孔最内侧点相对靶心的距离R’,根据图像比例关系,计算物理靶面上弹孔距离靶心的实际距离R,靶面上的最大的环线半径已知,根据下式计算靶数

2 关键算法
2.1 靶心的求取
在诸多控制点中确认出靶心是后续工作的基础,为了工作的简便,可以对靶心进行特殊处理(比如尺寸不同等)。为了使系统更具一般性和普遍性,通过算法来实现:对每一个点求取其到其它所有控制点的距离和,其中和最小的这个点即为靶心,下面给出理论依据。

将环线12等分,设为D1中心o到小圆a上各点距离平方和。如图3(a)所示,a1、a2、……、a12分别为分布在小圆上的12个控制点,小圆半径记为r,则
![]()
设D2为中心o到大圆b上各点距离平方和,如图3(b)所示,b1、b2、……、b12分别为分布在小圆b上的12个控制点,大圆半径记为R,则
![]()
在小圆a上任取一点,不妨取a1点,a1点到小圆其它各点以及到中心o的距离和设为D3,则
b1点到小圆上各点距离之和设为D’4则

由式(6)和式(9)可知,靶心到其它各点的距离之和相比其它各点到其它点的距离之和要小。
2.2 弹孔到靶心距离R的确定
由式(1)可以看出,R的计算精度唯一而直接地影响着报靶精度,针对点控制,提出了采用距离加权平均法来计算R。已知靶面上有n个控制点,适当选取其中距离弹孔眠最近的m个点作为控制点,分别记为M1、M2、…、Mm。物理靶面上这些点到靶心中心的距离分别为R1,R2,…,Rm;像面上M0到这些点的距离分别为r1、r2、…、rm,把1/ri(i=1,2,…,m)作为权重,采用加权平均的方法求取M0到中心基准点o的距离R,则

以m为例,如图4所示,假设M1、M2、M3和M4分别为最靠近弹孔M0的4个点,o为中心基准点,o到M1、M2、M3和的距离为R1、R2、R3和R4,则

很好地反映实际情况。
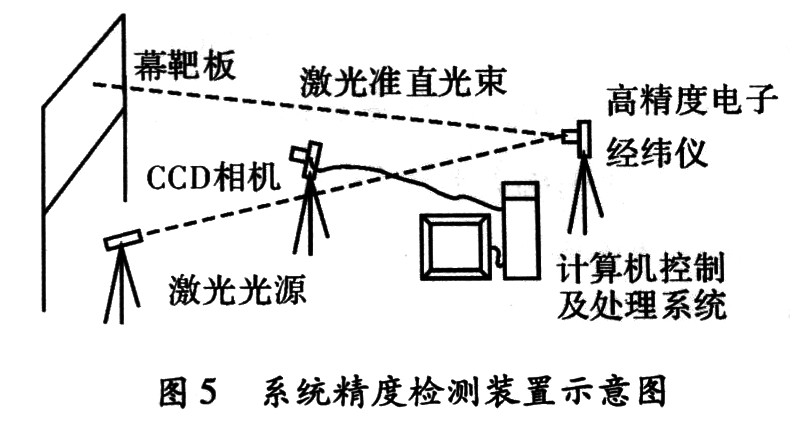
3 精度检测
为了便于检测,这里采用激光光斑模拟弹孔。检测设备布置,如图5所示,准直激光光束经过加装在高精度电子经纬仪目镜上的平面反射镜反射后,在靶面上形成一光斑。调节电子经纬仪,使得激光光束垂直于靶面,光斑和靶心基本重合,经纬仪读数为(α,β),把这个点记为T1;调节经纬仪,激光光束转过一定的角度,经纬仪读数为(α’,β’),此时的光斑记作T2,这时激光光束转过的角度为(2(α’一α),2(β’一β))。假设经纬仪到靶面的距离为l,则光斑在物理靶面上的位移△x可以通过下式计算得到
![]()
假设T1和T2图像上的中心为T’1和T’2,靶心为T,将T’1和T’2进行统一的坐标平移,平移后T’1和T重合。此时,T1可以看作靶心位置,T’2可以看作弹孔的位置,由本系统计算出T’2到T’1的距离△x’,即弹孔到靶心的距离R。令△=△x’-△x,则△的值就是测试的误差。

以上系统精度检测时,靶面距离电子经纬仪的距离l=3 880 mm,相机距幕靶板距离为1 550 mm。
从表1中的数据可以看出,从ccD相机到软件处理系统,整个弹孔的检测误差小于一个像素。
4 结束语
文中对传统的基于图像处理技术的自动报靶系统进行了分析,针对其不足之处,提出了基于点控制的自动报靶系统,采用点控制代替线控制,降低了图像识别的难度,大大减小了图像预处理工作,达到了系统的实时性要求。针对点控制,提出了距离加权平均法来计算靶数,避免了繁杂的图像几何矫正工作。通过模拟实验证明了该方法的可行性,并且具有较高的报靶精度。本系统亦可应用于多管平行度测量的工程中,并可得到很好的结果。