
引言
随着微电子技术和软件技术的发展,嵌入式技术也有了长足的进步。因此,基于嵌入式技术的图像数据采集与存储监控系统以其直观、方便、信息内容丰富的特点,广泛应用于许多场合。
处理器性能的提高,接口传输数据能力的增强,特别是未来高容量存储器的出现,图像监控系统的小型化、多功能化是易于实现的,嵌入式技术引入图像监控系统后,两个问题需要解决,一是灵活的图像监控系统结构调整,二是适合监控规范、集图像和信号检测与控制一体的交互式软件的设计。
1 系统平台的搭建
1.1 硬件平台的搭建
ARM(AdvancedRISCMachines),既可以认为是一个公司的名字,也可以认为是对一类微处理器的统称,还可以认为是一种技术的名字。
S3C2410处理器是Samsung公司基于ARM公司的ARM920T处理器核,采用0.18um制造工艺的32位微控制器。该处理器拥有:独立的16KB指令Cache和16KB数据Cache,MMU,支持TFT的LCD控制器,NAND闪存控制器,3路UART,4路DMA,4路带PWM的Timer,I/O口,RTC,8路10位ADC,TouchScreen接口,IIC-BUS接口,IIS-BUS接口,2个USB主机,1个USB设备,SD主机和MMC接口,2路SPI。S3C2410处理器最高可运行在203MHz。
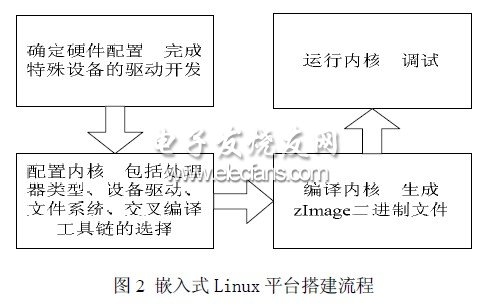
由S3C2410为核心的图像采集系统的硬件结构如图1所示。因为S3C2410内部只有很小的存储空间,所以我必须外扩系统的存储器,作为32位的微处理器,S3C2410支持8位,16位和32位寻址方式,有16M×32位的寻址能力,可方便地构建较大地存储空间,系统的存储器由FLASH和SDRAM构成。数码摄像头通过USB接口与S3C2410芯片连接,通过S3C2410芯片来控制数码摄像头对图像进行采集,并存储在存储器中。

1.2 软件平台的搭建
嵌入式Linux(EmbeddedLinux)是指对Linux经过裁剪小型化后,可固化在存储器或单片机中,应用于特定嵌入式场合的专用Linux操作系统。具体的搭建流程如图2所示。
2 USB摄像头设备驱动的开发
在Linuxkernel源码目录中driver/usb/usb_skeleton.c提供了一个最基础的USB驱动程序,我们称为USB骨架。通过他仅需要修改极少的部分,就可以完成一个USB设备的驱动。我们的USB驱动开发也是从它开始的。USB驱动程序结构如下:

该结构指明了USB设备驱动所要做的工作,具体内容如下:
(1)在驱动模块加载的时候,向USB核心子系统注册,并告诉子系统需要支持的设备。
(2)在卸载USB设备驱动程序向USB核心子系统注销。
(3)当获支持的设备插入或者拔出的时候,调用哪些功能。
在初始化函数中,USB设备驱动调用usb_register函数进行注册。

以上介绍了简单USB设备驱动程序的框架。但是我们要进行的摄像头驱动开发比上述驱动稍微复杂些。除了之前讲到的USB驱动还包括图像采集部分的设备驱动。
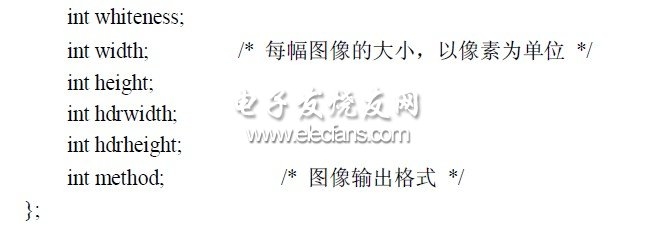
首先,我们需要定义一个数据结构,其中一个包括图片信息、采集模式、解码方式。具体定义如下。

LinuxUSB驱动程序需要做的第一件事情就是在LinuxUSB子系统里注册,并提供一些相关信息,例如这个驱动程序支持哪种设备,当被支持的设备从系统插入或拔出时,会有哪些动作。所有这些信息都将传送到USB子系统中。以下代码完成USB摄像头的注册功能:
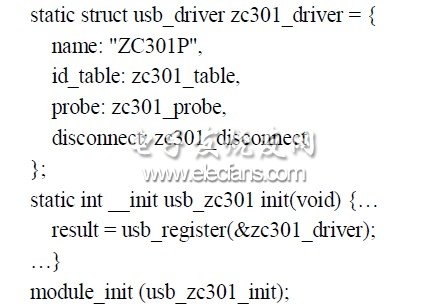
以上定义的数据含义如下ZC301是客户端驱动程序的名称,用于避免驱动程序的重复安装和卸载。
zc301_probe则指向USB驱动程序的探测函数指针,提供给USB内核的函数,用于判断驱动程序是否能对设备的某个接口进行驱动。
zc301_disconnect指向USB驱动程序中的断开函数的指针,当从系统中被移除或者驱动程序正在从USB核心中卸载时,USB核心将调用该函数。
zc301_table列表包含了一系列该驱动程序可以支持的所有不同类型的USB设备,如没有设置该列表,则该驱动程序中的探测回调函数不会被调用。
系统启动时,首先需要加载各种驱动模块,然后向系统注册了生产厂商号码(VendorID)和产品号(Pro-ductID)。当USB设备连接到主机上,系统会检测它的VendorID和ProductID,如果与驱动模块的注册内容匹配,则将该驱动程序与设备挂接起来[5]。当插入摄像头时,系统会调用zc301_probe函数。参数dev指定了设备信息,probe函数验证所有可选配置的有效性,并调用usbvideo模块的sbvideo_Regis-terVideoDevice()函数向videodev系统注册。
当系统完成驱动注册后,调用staticintzc301_init(structusb_zc301*zc301)和staticvoidzc301_start(structusb_301*zc301)函数完成对设备的初始化过程:填写各个寄存器值、启动摄像头。系统运行到这一步,基本完成了对摄像头驱动加载及设备初始化。接下来需要通过读取用户设定的图像规格,其中包括:图像格式、分辨率、颜色深度、对比度和亮度等参数。这些数值的读取都是通过以下函数实现的:

在得到这些参数值后,再调用一套函数,实现参数的设置。每个参数设置函数和之前的参数取值函数是一一对应的。具体函数如下:

通过调用上面的函数,我们基本得到了所需的参数值,这样我们就可以启动摄像头了。
当然我们还需要staticvoidzc301_shutdown(structusb_zc301*zc301)来关闭摄像头。
至此,摄像头驱动的驱动基本完成。通过这些函数的设置我们可以把具体的硬件电路抽象化为数据结构中的参数值。接下来我们可以通过V4L驱动来调用这些函数,实现对参数的赋值、打开设备、采集图像和关闭设备等一系列的过程。
重新编译、运行内核时,在串口反馈信息中会显示USB摄像头驱动程序成功加载。如图3所示。
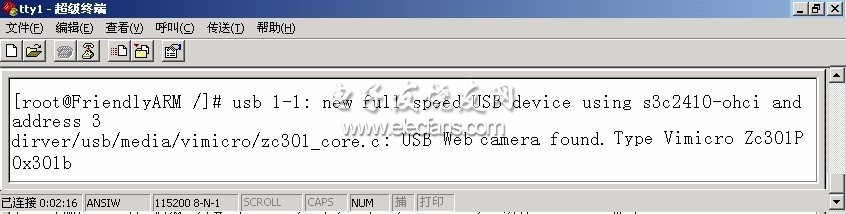
图3串口反馈信息3Video4Linux下的图像采集编程:
Video4Linux,简称V4L,是Linux中关于视频设备的内核驱动,它为针对视频设备的应用程序编程提供一系列半标准的接口。V4L利用这个接口,增加一些额外的功能,同时向外提供了一个属于自己的API。我们可以通过调用V4L的API来实现各种功能。在Linux下,视频采集设备的正常使用依赖于对Video4Linux标准的支持。目前的V4L涵盖了视、音频流捕捉及处理等内容,USB摄像头也属于它支持的范畴。
V4L中定义的主要数据结构:
这些数据结构都是由Video4Linux支持的,它们的用途如下:
(1)video_capability包含摄像头的基本信息,例如设备名称、支持的最大最小分辨率、信号源信息等,分别对应着结构体中成员变量name、maxwidth、maxheight、minwidth、minheight、channels(信号源个数)、type等;
(2)voide_picture包含设备采集图像的各种属性,如brightness(亮度)、hue(色调)、contrast(对比度)、whiteness(色度)、depth(深度)等;
(3)video_mmap用于内存映射;
(4)voido_mbuf利用mmap进行映射的帧信息,实际上是输入到摄像头存储器缓冲中的帧信息,包括size(帧的大小)、frames(最多支持的帧数)、offsets(每帧相对基址的偏移)。
系统在采集图像之前,需要初始化这些数据结构中的参数值,系统才能够按照要求采集图像数据。
在USB摄像头被驱动后,只需要再编写一个对视频流采集的应用程序就可以了。根据嵌入式系统开发特征,先在宿主机上编写应用程序,再使用交叉编译器进行编译链接,生成在目标平台的可执行文件。宿主机与目标板通信采用打印终端的方式进行交叉调试,成功后移植到目标平台。
V4L图像采集编程流程:
(1)打开视频设备;
(2)读取设备信息;
(3)更改设备当前设置;
(4)视频采集得到图像信息;
(5)对采集到的图像进行处理;
(6)关闭视频设备。
本文编写采集程序是在安装Linux操作系统的宿主机PC机上进行的,之后再移植到开发板上。下面是具体论述。
之前我们讲到了在V4L中定义的主要数据结构及其功能。对应着这些内容,我们需要对这些数据结构进行定义,以抽象化一个视频设备。以下是具体的定义内容:

摄像头、采集图像和关闭摄像头的操作。采集程序中定义了如下的函数,以实现前面讲到的功能。
intinit_videoIn(structvdIn*vd,char*device,intwidth,intheight,intgrabmethod);初始化摄像头设备。*vd包含了之前定义的数据结构中的基本信息。另外还要对摄像头采集图像的大小、采集模式等参数进行赋值。
intv4lGrab(structvdIn*vd,char*filename);采集图像主程序。*filename为图像的文件名,我们可以通过对文件名的设置来确定图像保存的位置。
intclose_v4l(structvdIn*vd);关闭摄像头intget_jpegsize(unsignedchar*buf,intinsize);采集图像的大小。
因为我们是通过调用采集主函数intv4lGrab(structvdIn*vd,char*filename)来实现图像的采集和保存的,所以需要详细的讲解一下该函数的构成。以下是该函数的具体内容:
首先,我们需要定义几个参数,如下:
FILE*fp;定义一个文件类型指针,指向我们采集到的图像文件intlen;
定义一个整型变量,记录从内存中读取的数据量intsize;
定义一个整型变量,指明一帧图像的数据量interreur=0;定义一个整型变量,指明运行时的错误返回值intjpegsize;定义一个整型变量,指明我们需要的图像大小。
接着我们调用read(vd->fd,vd->pFramebuffer,size)函数,把存放于图像缓冲区的数据读入到指定的临时文件中。之后根据我们对图像的大小、亮度、对比度等要求转化之前采集到的图像数据,最后我们打开一个文件,把图像数据写入到该文件中并保存。
4 结论
本文设计了一种嵌入式视频采集系统,该系统小巧,并且在保证当前信息完整的情况下,尽可能少的占用存储容量,实现了该系统的图像采集、存储和重现功能。在硬件规划上,采用实用简单的USB接口通信。且系统中预留了丰富的外设接口,便于今后的扩展升级。