[摘 要]:本文以DSP为信息处理单元,将电子天平与红外干燥箱融为一体,设计了一种水分测定电子天平。这种仪器具有水分测定与质量称量两种计量功能。采用时间最优控制与PID控制相结合的控制策略来对烘箱的温度进行实时控制,既可以发挥时间最优控制快速消除大偏差的优点,又能发挥PID控制精度高、超调小的优点,从而使静态、动态性能指标较为理想,同时又达到了准确、快速测定的目的。
水分是决定产品质量和工艺的基本参数,水分含的准确测定是产品质量的重要保证。目前诸多行业水分测定标准方法(仲裁依据)是烘干失重法,即将重量为W1,的试样按规定时间和温度烘干,烘干后失重设为W∞,则含水率为:  该方法直接测出水分蒸发量,称直接法,又称经典法。该方法需要使用分析天平和电烘箱,操作繁琐,而且由于电烘箱的温度波动较大,容易损坏样品。
该方法直接测出水分蒸发量,称直接法,又称经典法。该方法需要使用分析天平和电烘箱,操作繁琐,而且由于电烘箱的温度波动较大,容易损坏样品。
本文以DSP为信息处理单元,将电子天平与红外干燥箱融为一体,并将时间最优控制和PID控制相结合,设计了一种基于DSP的新型水分测定电子天平,采用时间最优控制和PID控制相结合的控制策略对烘箱温度进行实时控制,这样既可发挥时间最优控制快速消除大偏差的优点,又能发挥PID控制精度高、超调小的优点。
1 测试机理与结构设计
本文采用TMS320LF2407A的DSP作为信息处理单元,设计了一种基于DSP的新型水分测定电子天平,如图1所示。 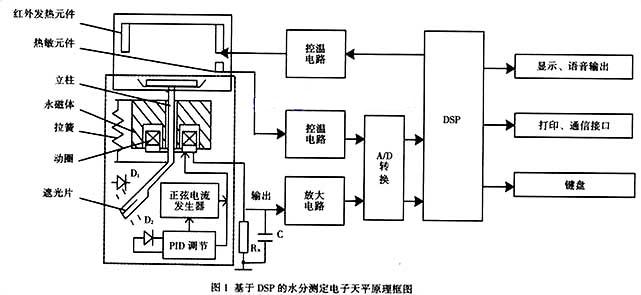
电磁力平衡传感器将被测质量转换成电信号输出至放大电路,变成0~5V直流电压信号,经A/D转换送DSP处理,显示、打印或语音输出测量结果。
红外干燥箱内的热敏元件通过测温电路和A/D转换随时向DSP提供温度测量信息。DSP根据键盘设定温度和烘箱内实测温度进行PWM控制,通过可控硅调功电路实现。
1.1红外辐射干燥机理
红外辐射烘干法的干燥机理仍基于经典法,用电阻式烘箱,试样中水分的蒸发主要靠热传导,失水速度慢,测量效率低。而红外法、微波法的加热方式可直接从物质内部加热,大大缩短了烘干时间,而且还具有清洁、无附件、安装方便等优点,因此在烘干加热领域得到了广泛的应用。
由于微波加热方式一般功率较大,难以控制,而且可能导致辐射泄漏,因此本文设计的新型水分快速测定电子天平采用了红外辐射加热方式加速样品烘干。
1.2质量称量原理
水分测定电子天平质量称量范围为0~300g,感量为0.001g。称重前,杠杆平衡,遮光板处于零位,加待称重物后,杠杆失去平衡,带动遮光板偏离零位,零位检测差分光电二极管输出的差分电压信号不为零;该信号经放大送入PID调节电路;PID调节信号送入动圈的驱动电路,改变动圈中的电流,使得杠杆向平衡方向运动;同时,差分光电二极管的输出信号减小,但由于PID调节环节的存在,调节信号继续增大,直到杠杆回到平衡位置,遮光板回到零位。质量称量信号经放大、滤波、A/D转换后送人DSP信息处理单元进行后续处理。
2红外干燥箱的温度检测与控制
2.1温控器原理
本系统选用MAXIM公司生产的自带温度补偿的K型热电偶串行模/数转换器MAX6675为测量电路,选用双向可控硅为控制元件,以DSP芯片TMS320LF2407为中心,设计了一套温控器电路。
主电路由双向可控硅BCR50GM控制,其开关电流为50A,通过实际调试,确定了控制电路参数,如图2所示。
MAX6675将热电偶输出的mV信号直接转换成数字信号送给DSP, MAX6675可对冷端温度进行补偿。
DSP送出PWM控制信号驱动光电耦合器MOC3061,以控制可控硅BCR50GM的导通与截止,使电阻炉的温度能够稳定在给定点附近。
通过测量温度与设定温度比较来调节DSP输出脉冲信号的占空比,进一步控制卤素红外灯平均导通功率,从而达到调节温度的目的。
2.2温度控制方法 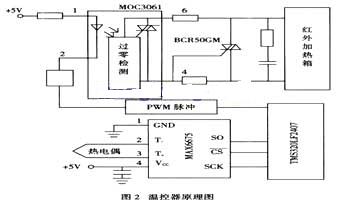 PID控制是一种技术成熟、应用广泛的控制方法,其结构简单,参数整定方便,而且对大多数过程均有较好的控制效果,因而本系统采用了PID算法控制加热舱温度。
PID控制是一种技术成熟、应用广泛的控制方法,其结构简单,参数整定方便,而且对大多数过程均有较好的控制效果,因而本系统采用了PID算法控制加热舱温度。
对于采用调压调功方式的温度控制,PID算式应当采用位置算式,即:
u(k)=u(k-1)+△u(k) (2)
式中: 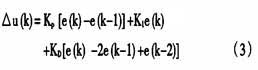 u(k)为k时刻的输入量;
u(k)为k时刻的输入量;
u(k-1)为k-1时刻的输入量;
△u(k)为输入调节量;
Kp,K1,KD分别为比例系数、积分系数、微分系数;
e(k)为当前时刻的温度与温度设定值差;
e(k-1)为上次采样时刻的温度与温度设定值差;
e(k-2)为再上次之差。
温度变化是一个缓慢的过程,若单纯采用PID控制,温度超调量大,调节时间长,从通电加热到温度恒定至少需要20min,控制效率低,能源浪费大,设备损坏率高。
时间最优控制使系统从一个初始状态转到另一个状态所经历的过渡时间最短。这种类型的最优切换系统,也称为开关控制(Bang-Bang)系统。即: 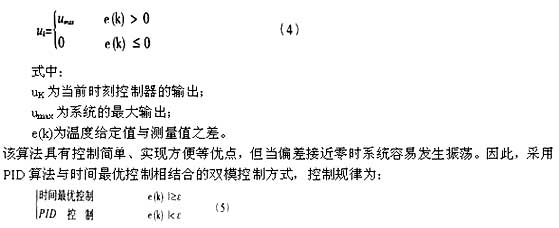 可以规定一阈值ε,当偏差大于ε时,实行时间最优控制,而在阈值以内,实行PID控制。这样,既可以发挥Bang-Bang控制快速消除大偏差的优点,又能发挥PID控制精度高,超调小的优点,从而使温度控制过程的静态、动态性能指标较为理想。
可以规定一阈值ε,当偏差大于ε时,实行时间最优控制,而在阈值以内,实行PID控制。这样,既可以发挥Bang-Bang控制快速消除大偏差的优点,又能发挥PID控制精度高,超调小的优点,从而使温度控制过程的静态、动态性能指标较为理想。
2.3参数整定
由于温度变化速度较慢,本系统选择采样时间TS为5ms,其余调节参数均在PID仿真基础上参考ZEGLER-NICHLE整定方法经实验确定。  由于控制电路输出脉冲信号的临界电压为1.66V,对应数字量为AAH(十进制数为170),所以将该电压值作为系统首次进入控制过程时u(k-1)值。
由于控制电路输出脉冲信号的临界电压为1.66V,对应数字量为AAH(十进制数为170),所以将该电压值作为系统首次进入控制过程时u(k-1)值。
3 性能测试
本系统经过反复温控试验以及连续运行的可靠性试验,最终确定了PID算法的参数。当系统施加给定升温时,在20~80℃范围内最大动态超调小于土2℃,稳态误差小于±0.2℃,系统运行状态良好。其典型响应曲线如图3所示。 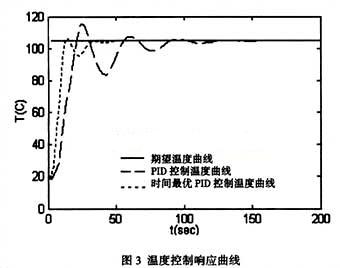
4 结论
本文提出了一种基于时间最优-PID控温水分测定电子天平,有效地避免了经典方法水分测定的重复性,大大提高了测量速度,为水分测定标准方法的发展开辟了新的途径。这种一仪多用的新型天平简化了水分测定与质量称量的操作,有利于提高实验室分析测试的工作效率,减少设备投资,因而具有广阔的应用前景。
