
捻线机是玻璃纤维生产线上的关键设备。捻线机的平稳运转以及适应生产工艺的多样化是生产线的必要条件,自动化控制是满足这些条件的必要保障。因此控制系统是玻璃纤维捻线机关键技术的重要环节之一。传统的生产设备由于老化或者自动化程度较低,不能满足行业发展的需要,必须对其进行技术改造。
用plc做控制系统核心,成本较低,稳定性很高,程序编写和调试比较方便。但plc在人机对话、故障判断、在线修改等方面有一些不便,需要对编程非常熟悉的专业人员进行操作。并且,要想直观地了解生产过程和监控信号的动态变化必须选择一个上位机来配合plc,才能组成较好的自动控制系统。因此,本系统采用触摸屏与plc 通信,共同组成生产过程的自动控制系统。
2 系统组成[1-2]
系统主要由触摸屏、可编程控制器plc、开关电源、步进电机驱动器、步进电机、变频器、三相异步电动机等构成,参见图1。本控制系统主要利用程序控制钢领板运行的速度、方向、位移,达到控制成形的目的,替代传统捻线机机械成形。
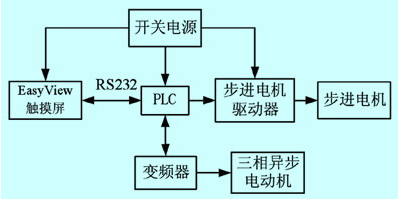
图1 系统配置框图
触摸屏作为人机界面可以进行工艺参数的设定、运行状态的监控等。可编程控制器是整个控制系统的核心。它将工艺参数存储并通过一定的控制算法控制变频器的运行状态以及步进电机的运行状态。开关电源为触摸屏、plc、步进电机(包括接近开关、按钮、中间继电器)等提供工作电源。步进电机驱动器将可编程控制器给定的控制信号转换和放大驱动步进电机工作。步进电机作为执行单元通过机械传动主要完成捻线机钢领板的升降动作。变频器通过可编程控制器控制运行状态,通过内部参数的设定,可以调整运行的频率,从而控制三相异步电动机的运行状态和工作频率。三相异步电动机作为执行单元通过机械传动主要完成锭子的传动和罗拉的传动。
3 eview触摸屏和plc通讯[3]
设计采用eview mt5000全新一代的工业嵌入式触摸屏人机界面。在mt5000组态软件中定义串口类设备s7200plc,串口号为com1。设备定义结束后,定义i/o 实型变量和离散变量,分别与设备输入寄存器和输出寄存器连接,实现开关量的控制。触摸屏与plc的连接如图2所示。
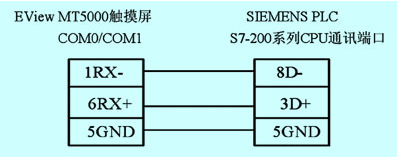
图2 eview mt5000与siemens plc的硬件连接图
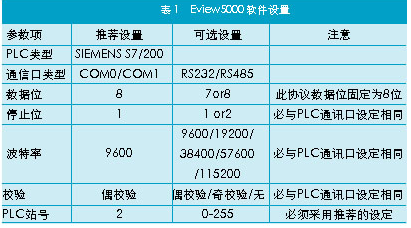
按如表1设置触摸屏中的通讯参数。
4 mt5000组态软件
4.1 嵌入式人机界面的组态软件
mt5000中用“工程”来表示组态软件组态生成的应用系统。创建一个新工程就是创建一个新的用户应用系统。建立工程的一般步骤为:构造数据库(定义变量),定义设备,设计图形界面,建立动画连接,运行和调试。但是,在进行设计的时候,它们不是独立的,而是交替进行的,需要综合考虑。首先,创建一个新工程,定义路径和名称,在设备选项中选定一个com口,进行plc连接。mt5000提供的设备连接向导对话框列出了工业生产常用的一些硬件设备(如plc、板卡、智能仪表、变频器等),并且已经根据这些常用设备各自的通信协议制作了相应的通信协议,使应用人员从繁琐的底层驱动程序中解脱出来。选择了西门子公司s7200系列plc后,选择通信方式,并给定设备名称和地址,还要设置采样时间和通信参数。然后,进行动画画面的设计和变量的定义。双击数据词典,定义和编写系统所有变量。变量可以设为只读、只写和读写模式。对于既要采集plc状态,又要实现对plc 的远程控制的变量设置为读写模式,而不需要向plc 发送命令的变量设置为只读,这样可以节省plc扫描时间,加快系统进程,提高plc效率。绘制图形画面时,双击画面选项,在弹出的绘图环境下绘制与捻线机相对应的监控画面。系统监控的设备较多,为更清楚明了地显示不同设备的各个参数,需要绘制多副画面,既方便显示,又方便现场操作员进行控制。主画面里利用showpicture(“画面名”)函数实现对其他画面的调用。绘制完流程画面后,将系统与要监控的参数和画面中的变量一一对应起来。这样hmi组态基本完成。
4.2 组态画面设计及功能介绍
在mt5000组态软件中编制系统的组态界面。根据本系统的特点及实际使用情况,界面设计由系统开机欢迎、上电提示、零点调整和查询(基本参数有六个:总程、动程、升速、降速、级升、滑行)、方式设置的修改和查询(成形方式、停车方式、回零方式)、数据的修改和查询(五个内部参数分别是:计长长度、罗拉直径、高度系数、手动速度、回零速度)等画面组成。作为举例,给出了零点调整画面(图3)和数据设置画面(图4)。
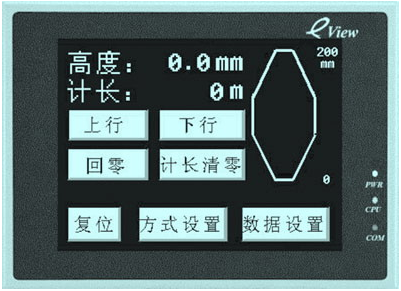
图3 零点调整画面
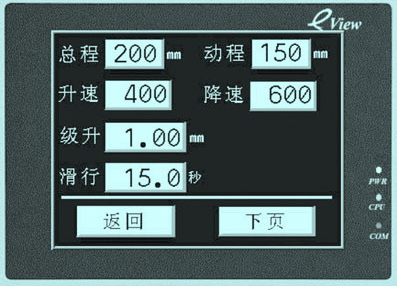
图4 数据设置画面
零点调整画面动态显示纱线的高度及长度。并动画显示纱线的成形过程。不同的纱型具有不同的动画显示过程。
数据设置采用弹出数字小键盘的形式进行数据的设置和修改。
整个画面设计简单易懂,一目了然。使操作人员不需要专业知识,随着操作提示和帮助,首次操作就可以完全独立地进行工作。
5 plc程序设计[4-5]
plc的主要输入输出端口定义如表2所示;plc寄存器单元分配如表3所示。

为方便地增加或删减程序模块, 同时也便于针对不同程序模块进行完善, 程序设计采用模块化结构。plc 程序流程图如图5 所示。
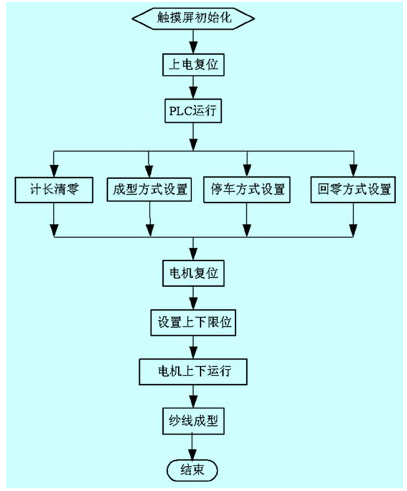
图5 捻线机程序流程图
6 结束语
实际应用结果表明,玻璃纤维捻线机自动控制系统采用easyview触摸屏,简化了控制系统结构,大大提高了控制系统的实时监控性,有效的降低了生产成本;plc控制捻线机的运行和纱线的成形,达到了预期的控制效果,提高生产效率。该项应用促使玻璃纤维生产设备的自动化水平上一个台阶,对传统纺织工业生产设备升级换代起到积极推动作用。同时,自动化技术的使用,有利于企业实施综合自动化管理,使企业从粗放型向集约型转化。