
本系统以单片机AT89C51 为电动车的控制核心, 利用红外遥控器配以红外接收头及直流电机的正反转控制电路来实现电动车的运动控制。系统由红外线遥控器, 红外线接收模块, 电动机驱动模块, 显示及声光指示模块, 方向控制模块等几部分组成。系统流程如图1, 原理框图如图2.
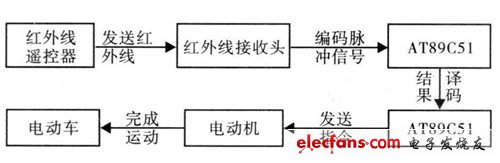
图1 原理流程图

图2 系统框图
1 红外遥控系统
通用红外遥控系统由发射和接收两大部分组成, 应用编/ 解码专用集成电路芯片来进行控制操作, 如图3 所示。发射部分包括键盘矩阵、编码调制、LED 红外发送器; 接收部分包括光、电转换放大器、解调、解码电路。
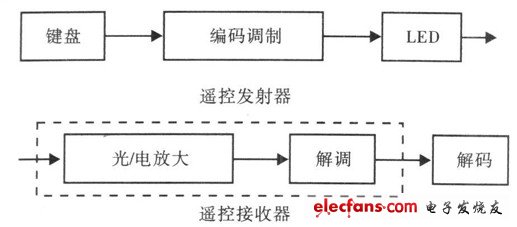
图3 红外遥控系统框图
1. 1 遥控发射器及编码
当发射器按键按下后, 即有遥控码发出, 所按的键不同遥控编码也不同。这种遥控码具有以下特征:
采用脉宽调制的串行码, 以脉宽为0. 565 ms、间隔0. 56 ms、周期为1. 125 ms 的组合表示二进制的"0"; 以脉宽为0. 565 ms、间隔1. 685 ms、周期为2. 25 ms 的组合表示二进制的" 1" , 其波形如图4 所示:
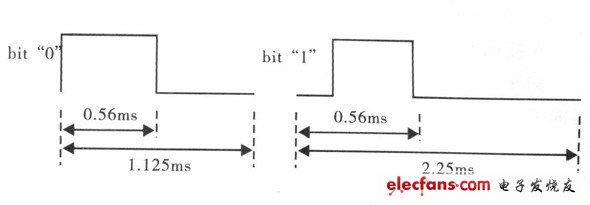
图4 遥控编码的"0"和"1"
上述" 0"和"1"组成的32 位二进制码经38 kH 的载频进行二次调制以提高发射效率, 达到降低电源功耗的目的。然后再通过红外发射二极管产生红外线向空间发射。
1. 2 接收器及解码
解码的关键是如何识别"0"和"1" , 从位的定义我们可以发现" 0" 、"1"均以0. 56 ms 的低电平开始, 不同的是高电平的宽度不同,"0"为0. 56 ms, "1"为1. 68 ms, 所以必须根据高电平的宽度区别"0"和" 1" .如果从0. 56 ms 低电平过后, 开始延时, 0. 56 ms 以后, 若读到的电平为低, 说明该位为"0" , 反之则为"1" , 为了可靠起见, 延时必须比0. 56 ms 长些, 但又不能超过1. 12 ms, 否则如果该位为"0" , 读到的已是下一位的高电平, 因此取( 1. 12 ms+ 0. 56 ms) / 2= 0. 84 ms 最为可靠, 一般取0. 84 ms 左右均可。
根据码的格式, 应该等待9 ms 的起始码和4. 5 ms 的结果码完成后才能读码。单片机双机通信#e#
2 单片机双机通信
AT89C51是一种带4K 字节闪烁可编程可擦除只读存储器的低电压、高性能CMOS8 位微处理器, 俗称单片机。
多个MCS- 51 单片机可利用串行口进行多机通信。在多机通信中, 要保证主机与所选择的从机实现可靠的通信, 必须保证串行口具有识别功能。串行口控制寄存器SCON 中的SM2 就是为满足这一要求而设置的多机通信控制位。其多机控制原理是在串行口以方式2( 或方式3) 接收时, 若SM2= 1, 表示置多机通信功能, 这时出现可能情况: ( 1) 接收到的第9 位数据为1 时, 数据才装入SBU F, 并置中断标志RI= 1 向CPU 发送中断请求; ( 2) 接收到的第9 位数据为0 时, 则不产生中断标志, 信息将被抛弃。
若SM2= 0, 则接收的第9 位数据不论是0 还是1, 都产生中断标志, 接收到的数据装入SBUF 中。
双机通信的工作过程如下: ( 1) U2 初始化程序允许串行口中断, 将串行口变成为方式2 或方式3接收, 即9 位异步通信方式, 且置SM2 和REN 位为1, 使U2 只处于双机通信且接收地址帧的状态; ( 2)在U1 和U2 通信时, U1 发送地址信息的第9 位为1, 数据( 包括命令) 信息的第9 位为0.U 2 的串行口接收到的第9 位信息RB8 为1, 且由于SM2= 1, 则置1 中断标志位RI, U2 响应中断, 执行中断服务程序; ( 3)接着U 1 发送数据帧, U 2 接收数据帧, 然后进行处理。
3 电动机的驱动
L298N 是一款较常用的高电压大电流全桥双路电机驱动芯片, 用T TL 电平输入控制信号即可实现对伺服电机、直流电机及步进电机等多种电机的控制。一片L298N 中包含了两路控制放大电路,用它可以构成两个同类型的控制电路。
取其中的一路构成的电机控制电路如图5 所示。其中, 13、14 脚为电机控制输出端, 直接接在电机的两个输入端; 10、11、12 脚为逻辑电路输入端, 可以直接与单片机、PLC 等控制芯片相连; 9 脚VSS 接+ 5V 的逻辑电路电源, 4脚VS 接电机的电源, 电压大小即电机额定输入电压; 8 脚接地。
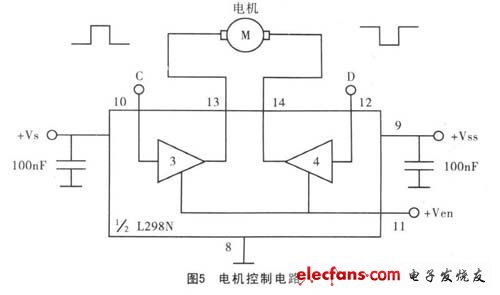
只要通过控制电路对C、D 两个输入端输入T TL 电平的0 或1 即可控制电机的正转、反转及停止。
当向C、D 两端输入同样电平时, 可实现电机的快速停止。另外将使能端V en 置零也可以使电机停止。
4 电机的PWM 调速
在直流伺服系统中, 速度调节主要通过改变电枢电压的大小来实现。 经常采用晶闸管相控整流调速或大功率晶体管脉宽调制调速两种方法, 后者简称PWM, 常见于中小功率系统。它采用脉冲宽度调制技术, 其工作原理是: 通过改变“接通脉冲”的宽度, 使直流电机电枢上的电压的"占空比"改变, 从而改变电枢电压的平均值, 控制电机的转速。PWM 电路由四个大功率晶体管组成H 桥电路构成, 四个晶体管分为两组, 交替导通和截至, 用单片机控制达林顿管使之工作在开关状态, 根据调整输入控制脉冲的占空比, 精确调整电动机转速。这种电路由于管子只工作在饱和和截止状态下, 效率非常高。H 型电路使实现转速和方向的控制简单化, 且电子开关的速度很快, 稳定性也极强, 是一种广泛采用的PWM 调速技术。
5 显示电路
常用的数码显示器件主要有LED 数码显示器和LCD 液晶显示器, 本系统采用LED 显示器。它是用发光二极管( 简称LED) 组成字形来显示数字、文字( 主要是拉丁字母) 和符号的。同一规格的数码管一般都有共阳极和共阴极两种类型。本设计采用共阴型。其电路图如图6 所示。其中74LS247 为译码器, 引脚如图7 所示。


6 结语
本文用红外遥控器来实现电动车的运动状态控制, 利用红外遥控器发送指令, 指令信号经红外接收头接收、处理后转换为脉冲信号, 然后发送到单片机进行译码。单片机译码后, 根据预先编写好的程序, 输出相应的指令, 通过电动机的控制电路, 从而控制电动机的运动, 实现对电动车的运动控制的目的。如把设计中的直流电动机换成伺服电机, 再配合单片机可以精确的控制伺服电机的动作, 凡是需要以单片机控制想要拉动或是做简易的机械式传动的机构设计都可以应用这种设计。