
高温超导磁浮车悬浮高度测量研究
2007-09-12
作者:孙德荣,邓昌延,梁建明
摘 要: 提出了测量高温超导" title="高温超导">高温超导磁浮车悬浮高度的系统解决方案,着重介绍了尺寸测量" title="尺寸测量">尺寸测量信号的提取方法,详细阐述了二值化" title="二值化">二值化处理方法和数字处理方法。
关键词: 悬浮高度测量 线阵CCD 激光
磁悬浮列车" title="磁悬浮列车">磁悬浮列车作为目前最快速的地面交通工具,其技术有着其他地面交通技术无法比拟的优势,具有速度高、能耗低、噪音低、运行平稳、乘坐舒适和绿色环保等特点。高温超导磁悬浮列车更是一个新的突破,是我国“863”计划的科研成果之一。在磁悬浮列车运行过程中,必须实时检测列车的悬浮高度,这是列车运行的一个关键数据,关系到列车的运行安全。磁悬浮列车具有极高的速度,并且高温磁悬浮列车的悬浮高度只有20毫米左右,因此要求采用高速、高精度的非接触测量方法对列车悬浮高度进行测量。
1 测量原理
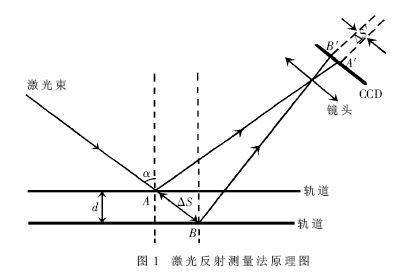
CCD(Charge Coupled Devices)电荷耦合器件是一种高精度、高灵敏度的光电耦合器件。它具有自扫描特性,能够将按空间域分布的光学图像信号变换成按时间域分布的离散电压信号,继而通过电子处理系统对这一信号进行处理。由于CCD具有非接触性测量、分辨率高等特点,因此在非接触尺寸测量方面应用广泛。激光具有高亮度、相干性好、方向性好等优点,将激光技术与CCD器件结合起来进行尺寸测量是一个比较好的解决方案。图1为激光反射测量法的原理图(以列车为参照物,可以看作轨道在变化)。其工作原理是激光二极管发射光束照射在列车轨道上形成光斑,经过半漫反射,光斑通过镜头成像在CCD器件上,CCD将光信号转换成电信号。当列车和轨道之间的相对距离发生改变时,光斑在CCD上的成像也随之变化。通过检测光斑像在CCD上的变化,进而计算出列车和轨道之间距离的变化。为了简化计算,将入射光束与镜头的光轴垂直。设列车和轨道之间相对变化的距离为d,其计算公式为:
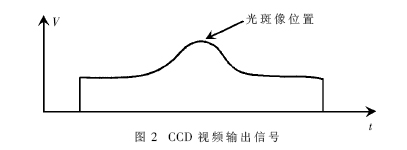
M0为物方放大率,可见公式中只有△S′为未知量。由于CCD能把光敏面上影像的光学信息转换成与光强成正比的电荷量,用一定频率的驱动脉冲驱动CCD,因此在CCD输出端便可获得被测对象的视频信号。视频信号中每个离散电压信号的大小对应该光敏元所接受光强的大小,信号输出时序则对应光敏元位置的顺序,从而完成信息从空间域到时间域的转换。视频输出信号经低通滤波后得到如图2所示的波形。
2 光学系统的选择
光学系统负责传递目标光学信息,其功能直接关系到CCD像敏元上成像的稳定性和准确性,进而关系到整个系统的工作距离、分辨率等性能参数。因此要求光学系统成像好、杂散光少、几何畸变小。选择物镜时主要应该考虑物镜像场的大小、物镜的焦距和工作物距等参数。物镜的焦距可以根据公式f=d0/(1+M0)求出。d0为系统的工作物距,M0为物方放大率。在其他参数不变的情况下,焦距越短,视场(即检测距离)就越大,物方放大率就越大,检测精度就降低;反之视场就越小,物方放大率就越少,检测精度就越高。因此物镜焦距选择时一定要与整个系统设计要求相匹配,在测量范围和测量精度" title="测量精度">测量精度间作出均衡处理。
3 CCD视频信号的处理
通过对CCD视频信号的处理可以准确找出光斑在光敏面上成像的准确位置,而CCD视频信号处理的优劣直接影响到整个系统的测量精度。根据CCD视频信号应用的差异,可以分为二值化处理和数字信号处理两种数据处理方法。
3.1 二值化处理法
二值化处理法是指先对CCD视频信号进行二值化处理以后,再提取出特征信号的数字量,如图3所示。

图中: 是外同步信号,其上升沿对应于CCD的第一个有效像素单元,Uo是视频输出信号。
是外同步信号,其上升沿对应于CCD的第一个有效像素单元,Uo是视频输出信号。
硬件电路原理如图4所示。

由于锁存器是上升沿有效,锁存器1和2分别存有N1和N2时刻计数器的值,因此光斑像中心位置所对应的脉冲数N=(N1+N2)/2。N乘上脉冲当量就可以得到光斑在CCD上成像的位置,从而计算出列车相对于轨道的距离。提高计数脉冲的频率能够细分SN1、 SN2,从而提高系统的测量精度。
二值化处理方法的优点是系统简单、成本低、处理速度快等;缺点是抗干扰性能差,特别是对杂光的干扰比较敏感。
3.2 数字信号处理法
CCD视频信号的数字化处理过程如图5所示。先将CCD输出的时序脉冲调制信号经低通滤波器变换成在时间上连续的模拟信号;然后经A/D转换器将模拟信号转换成数字量,送入DSP芯片进行数字处理。

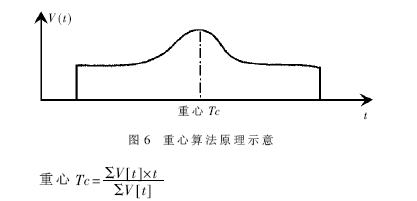
由于本系统是一个实时测量系统,对测量速度要求较高,因此要求数据的处理算法简单可靠。在计算光斑位置上,重心法具有重复计算精度高,数据量少,计算简单,抗干扰等优点。其原理的基本思想与在一维空间求物体的重心一致,如图6所示。
数字处理方法具有灵活性好、精度高、抗杂光干扰强、系统稳定性好等优点;缺点是系统复杂,成本高,测量速度相对较慢。
上述两种数据处理方法都能够满足磁悬浮列车悬浮高度测量的要求。采用嵌入式设计使测量仪器的功耗降低、体积减少、可靠性增强,因此其适用的场合更加宽泛,可以应用到其他非接触测量领域。
参考文献
[1] 蔡文贵,李永远,许振华.CCD技术及应用[M].北京:电子工业出版社,1992.
[2] 王庆有.CCD应用技术[M].天津:天津大学出版社,2000
[3] 陈明君,姜承宾,李 旦.激光-CCD器件在自动化精密测量中的应用[J].压电与声光,2001,23(6):415-416.
[4] 高爱华,田爱玲,赵贵波.基于线阵CCD的尺寸测量装置[J].西安工业学院学报,2003,23(3):189-190.
[5] 李为民,邢晓正,戴礼荣等.DSP技术在线阵CCD测量系统中的应用[J].仪器仪表学报,2002,23(2).
基金资助:国家863计划项目(2005AA306150)