
1 引言
本文设计了以串级调节为基础,对汽温对象进行系统辨识,利用神经网络进行建模,并加入中间点温度作为前馈信号的控制方案,并利用单纯形法对PID参数寻优,用以检验智能算法在控制系统中应用的有效性。直流炉中间点温度是一个非常重要的参数,是燃水比是否恰当的依据。由于两级喷水减温的控制基本相同,因此本文只以一级喷水减温为例来说明所设计的系统。
2 神经网络PID控制器的Matlab数字仿真
2.1 系统辩识
在训练参数给定的情况下,改变神经网络隐层个数以及各层神经元个数,经训练均可得到不同的网络,但其拟合训练数据的能力不同。依据各网络的拟合性能指标,选取拟合效果最佳的具有两个隐层的神经网络,来代替实际的广义被控对象。该网络的两隐层激活函数均采用Sigmoid型(S型)函数,输出层采用purelin线性激活函数,各层的神经元个数分别为[3,3,10,1]。这样所建立的神经网络具有最好的控制效果。图2-1-2给出了此网络结构下基于trainbr训练的误差变化曲线。
训练后期,SSE值基本保持不变,这说明该网络已经接近收敛了。
2.2 PID参数优化
在由神经网络将对象的特性和模型辨识出来以后,我们用单纯形法对PID参数进行优化,目标函数采用改进后的综合目标函数,得到的结果如图2-2-1:(优化效果较好)
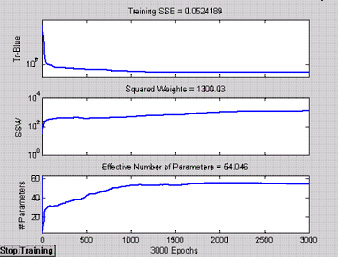
图2-1-2 基于trainbr训练的误差变化曲线

图2-2-1 单纯形法优化结果
2.3 神经网络与经典PID控制的对比
将该神经网络控制器与经典的PID控制器作比较,用MATLAB对其进行仿真,仿真曲线如图2-3-1,2-3-2,2-3-3所示。图2-3-1,2-3-2,2-3-3中,曲线1为内、外回路的控制器均采用PID控制器的仿真曲线;曲线 2 为内回路控制器采用神经网络控制器、外回路控制器采用PID控制器的仿真曲线。综上所示,对于主汽温系统,采用神经网络辨识的自整定PID控制器的串级控制,其超调量较小,过渡时间小,稳态精度高,而对于系统参数变化具有较强的适应能力。
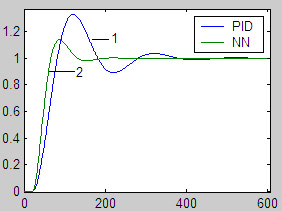
图2-3-1 加阶跃输入(r=1)时的响应曲线
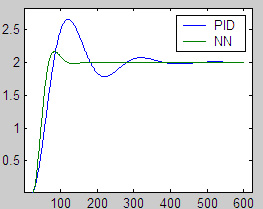
图2-3-2 加阶跃输入(r=1)时的响应曲线

图2-3-3 对象参数变化时的响应曲线
3 基于神经网络辨识的PID温度控制控制仿真实验
3.1实物仿真实验
通过仿真,可以得知神经网络 PID 控制器的性能要优于常规 PID 控制器,为了进一步验证这一点,本文采用了实验模拟这一方法来进行检验。在实验中采用了由电阻炉加热的水温控制系统来进行了模拟,实验系统如图3-1所示。针对神经网络PID 控制器的控制效果以及抗扰动和鲁棒性能,结合硬件和软件的设计,实验内容着眼点集中在:(1)不同控制周期对于温度控制的影响;(2)神经网络 PID 控制器的阶跃响应;(3)神经网络 PID 控制器的抗扰动以及对被控对象的鲁棒性;(4)PID控制参数的在线整定。
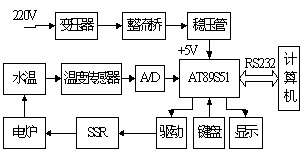
图3-1 实验系统设计图
3.2 硬件设计
系统的主要硬件组成:
(1)电源部分利用变压器将外界交流220V电压变为7.5V,再利用整流桥将其整流为直流+5V电压,供给单片机及系统使用。
(2)主芯片部分采用AT89S51芯片,它是一个有4 kBFlash可编程、可擦除只读存储器(E2PROM)的低压、高性能8位单片机。
(3)温度检测采用DS18B20传感器,DS18B20仅有3个引脚,采用1-wire技术,测量温度范围为 -55°C~+125°C,精度最高可达12位(0.0625度)。从DS18B20的数据引脚输出的是直接已经转化后的温度数字信号,大大提高了系统的抗干扰性。
(4)键盘部分用三个按键实现操作,一个按键实现设定温度与实际温度的切换,另外两个按键实现是定温度时增加和减少设定值。上电后LED显示当前温度,按下切换键后即可进行温度设定,再次按下切换键可返回到当前温度显示。
(5)显示部分利用74HC164将一位输入变为8位并行输出并送到LED进行显示.
(6)本系统利用MAX232芯片与上位机进行通信。
(7)输出部分采用固态继电器将单片机+5V输出转换位为20V交流输出以控制电炉的通断,从而达到控制水温的目的。
3.3 软件设计
这个实验装置以AT89S51为核心,AT89S51单片机模糊控制系统要完成数据采集、数据显示、温度控制及串行通信等功能。整个温度控制系统程序可划分为以下几个部分,主程序、中断子程序、数据采集滤波放大子程序,A/D转换子程序、显示子程序、读取键盘子程序,报警子程序,RS232通信模块等等。系统程序的编制采用了模块化的结构,它们之间通过软件接口连接。本系统的软件采用C语言编写,在WAVE6000版本的集成开发环境下进行编译连接。由于神经网络数据运算量巨大,所以我们将系统的神经网络训练和辨识以及PID参数寻优部分放在上位机上,由MATLAB完成计算之后经由MATLAB与C语言的接口将优化后的数据发送到下位机,由下位机来完成执行功能。
4 创新观点
本文作者创新点:基于系统辨识及神经网络的基本理论及PID参数整定方法及遗传算法的基本原理及基本操作,提出基于遗传算法寻优PID参数的构想。在对神经网络辨识PID控制器在过热蒸汽温度控制上的仿真发现,神经网络辨识PID控制器能够满足温度控制要求,具有相当好的鲁棒性。利用电阻炉水温控制实验来模拟过热蒸汽的控制,通过分析实验数据发现神经网络 PID 控制要优于常规 PID 控制器,可以达到响应快、超调小、抗扰动和鲁棒性好的要求。
参考文献:
[1] 何一文,陈铁军,苗小冬.基于单元模型的神经网络预测控制及其应用.微计算机信息, 2006年第8-2期,P290-292
[2]陈大禧,朱铁光,大型回转机械诊断现场实用技术,北京:机械工业出版社,2002
[3]何立民.单片机应用技术选编(5)[M].北京:北京航空航天大学出版社,1997
[4]周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2005
[5]周立功.ARM嵌入式Linux系统构建与驱动开发范例[M].北京:北京航空航天大学出版社,2006