
摘 要:神经网络具有自学习、自调整、自适应能力。本文介绍了由PLC控制实现的神经网络PID自适应控制器。实验表明,该技术对于提高控制精度是行之有效的。具有在调速系统中推广应用的价值。
关键词:PLC;PID控制器;神经网络;直流调速系统
一、引言
虽然目前的交、直流传动系统都有较成熟的控制方案,采用线性PI或PID 调节器可以取得基本满意的控制效果。但是,常参数的PID调节器只对线形系统有效,它们的控制性能因为系统的非线性而降低。在电力传动系统中,虽可以建立电机模型,但是电机本身和负载的一些参数(如交流电机的转子电阻、拖动负载的转动惯量)是无法确定的、时变的。电气设备的机械饱和特性,开关的失控时间、控制延时都是不能精确建模的非线性因素。 然而将模糊与神经网络技术引入电力传动系统设计智能控制器却可以很好地克服电力传动对象变参数、非线性等问题,大大提高系统的鲁棒性。引入模糊与神经网络技术的主要优点是不需要过程的复杂模型,而且适应性强,容易实现。
本文是将PID控制规律融进神经网络[3]之中,实现神经网络与PID控制规律的本质结合,共同完成PID自适应调节,并用PLC实现神经网络PID自适应控制,确保电力传动系统的控制精度和可靠性。
二、PID自适应控制器
常规PID控制算法为:
(1) 
用求和代替积分,微分用有限差分代替,即上式为:
(2) 
式中T为采样周期,KP是比例系数,KI=KP/TI是积分比例系数,KD=KPTD是微分比例系数。
根据上式,组成由两层线性神经网络构造的控制器,如图1所示。它是由比例、积分、微分三个单元组成的一种动态前向网络,各层神经元个数、连接方式、连接权值是按PID控制规律的基本原则和已有的经验确定,能够保证系统的稳定和快速收敛。
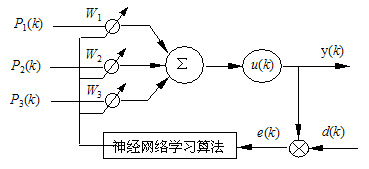
图1神经网络PID自适应控制器
其中r为系统给定值,y为系统输出值,d为标定值, Lr为学习步长:0
本文用PLC实现神经网络PID自适应控制,并应用于直流逻辑无环流可逆调速控制系统,使系统的控制精度达到了只有理论上才能实现的无静差。考虑到可逆调速控制系统的控制设备、器件数量多、对系统运行安全可靠提出的更高要求,采用高可靠性的PLC作为控制核心,以晶闸管为执行机构的直流调速控制系统,其系统主要由两部分构成,系统框图如图2所示。其中PLC实现神经网络PID自适应器与逻辑无环流双闭环的控制部分,长划线-点-点虚线框内为(V—M)三相桥式晶闸管—电动机系统,GT为V—M系统的晶闸管触发电路,它由硬件实现。短划线虚线框内为换向软开关,由PLC软件实现。
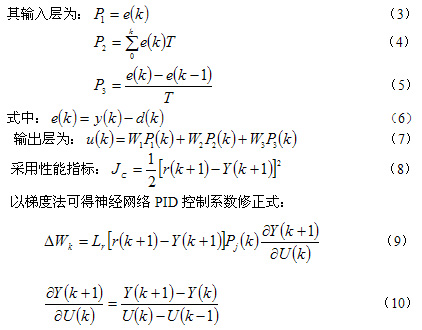
图2系统组成框图
该系统为速度、电流双闭环调速系统,也就是说PLC对这三个模拟输入信号分别进行速度调节器和电流调节器相串联的两级PID运算,向晶闸管的触发电路给出移相电压信号。所以,系统跟随的快速性及控制精度关键取决于PID调节器的设计和调节精度。本系统采用单神经元组成的PID自适应控制器,它即具有传统PID控制器的优点,又具有神经网络的并行结构和学习记忆功能,并且结构简单,易于实现,所以它更适合于控制系统。
四、基于PLC的自适应控制方法
作为现代工业三大支柱(机器人、CAD/CAM、PLC)之一的PLC具有可靠性高、抗干扰能力强、操作灵活简单、接线简洁、性价比高等优点,特别是易于扩展、编程简单、耐恶劣环境能力强等特点,已迅速占领了工业生产自动化领域,成为工业自动化领域的强有力工具。
在PLC中实现神经网络PID自适应控制,即可减少分接头数,提高PID调节的快速性和控制精度,又可以保证动作的可靠性,提高系统运行的安全性。
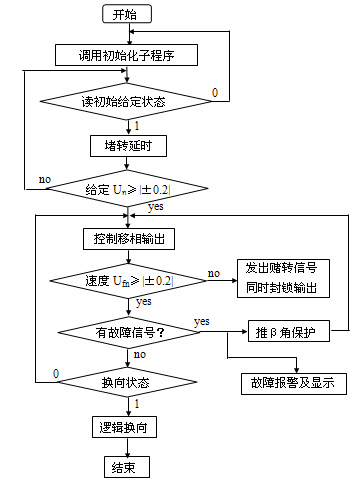
在直流双闭环调速系统中,为了提高系统响应的快速性和限流的必要性,电流内环仍然采用传统的PI调节器,而转速环则采用神经网络PID自适应控制器,以提高系统的鲁棒性。这两级相串联的PID运算都由PLC实现,我们把这一运算环节作为中断程序来处理。PLC的PID自适应控制中断处理子程序流程图如图3所示。
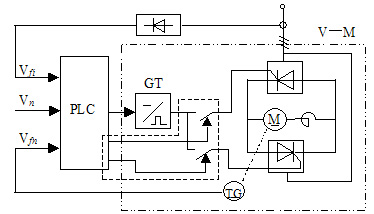
图3中断处理子程序流程图
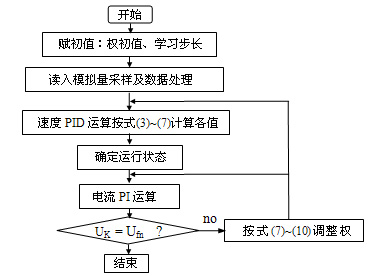
图4主程序流程图
我们选用西门子公司S7-200系列的PLC进行系统配置[5]。根据逻辑无环流可逆直流调速系统实际运行的要求,PLC主要实现了两级串联PID自适应调节及逻辑换向原则。同时,还实现了系统保护功能和系统显示功能。
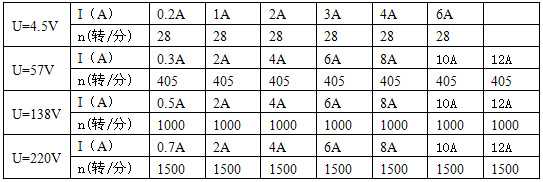
针对该直流调速系统的控制功能,我们在实验室进行了带负载实际运行实验,实验直流电动机的额定参数为U =220V I = 12A n =1500转/分,实验线路示意图如图2所示。实测的机械特性数据如下表所示:
测试结果证实,其静特性能够达到只有理论上的无静差,静差率S = 0。
其它技术性能指标也均达到了设计要求。
五、结束语
用PLC实现的神经网络PID自适应控制器应用于传动调速系统,控制精度高, 而且经济可靠、抗干扰能力强,在允许负载、电枢电阻和转动惯量变化的范围内,都能保持响应的快速性以及无静差、无超调的优良性能。它特别适用于机床控制系统,它即可以实现调速部分,同时也可利用PLC顺序控制的应用特点,替代其余的继电器控制部分,这样可使系统结构紧凑,便于维护。
参考文献
[1] 陈宇编. 可编程序控制器基础及编程技巧[M]. 上海:华南理工大学出版社,1999
[2] S7—200可编程序控制器系统手册[Z]. SIMATIC, 1998.
[3] 侯远龙. 电气传动系统PID自适应控制研究[J]. 工业仪表与自动化装置,2001,2
[4] 曹承志编. 微型计算机控制新技术[M]. 北京:机械工业出版社,2001.
[5] 陈均. 基于S7—200的潜水泵站自动控制技术 [J]. 微计算机信息。2006. 9:140—142.
[6] 陶永华等. 新型PID控制及其应用[M]. 北京:机械工业出版社,1998,9.