摘 要:针对火电厂的调速型液力偶合器,介绍了基于西门子S7-200PLC" title="PLC">PLC的控制系统" title="控制系统">控制系统,包括测控对象分析、系统硬件组成和控制程序设计等。运用PID算法调节水泵转速,控制系统提高了整机运行的可靠性和经济性。
关键词:液力偶合器;PLC;电动执行器" title="电动执行器">电动执行器;PID
火力发电厂的锅炉给水泵,需要根据机组负荷的改变来调节给水压力和给水量。在几种调节方式中,因改变给水泵转速来调节流量具有明显的节能效果而被广泛采用。对于大容量机组的锅炉给水泵,通常以异步电动机为动力,几乎都是通过安装液力偶合器进行机械调速,并且这种调速方法具有空载起动电动机的良好作用[1]。
液力偶合器属于电厂辅助设备,目前大多数都是采用分散仪表监控,有的甚至脱控运行,亟待运用测控新技术,对其运行状态参数进行自动监测和控制。西门子S7一200PLC是一个非常好的选择,它性价比高、系统组装和构建网络非常灵活、而且具有PID调节指令功能,编程和调试非常方便,因此,基于西门子PLC的控制系统将极大地提高整机运行的可靠性和经济性。
1 调速原理
液力偶合器安装于异步电动机和给水泵之间,它是一种利用液体通过泵轮和涡轮来传递功率的传动装置,主要由泵轮、涡轮、旋转外壳和勺管等部件组成,如图1.1所示。工作时,输入轴从电动机处获得能量,通过中间轴,泵轮将机械能转变为工作腔内的液体动能,推动涡轮转动,再变成机械能传给输出轴,带动锅炉给水泵工作。

为适应机组工况的变化要求,在电动机转速恒定的情况下,调节勺管的开度,可改变偶合器工作腔里的充液量,不同的充液量可以得到不同的输出特性,因此,通过连续改变充液量既可实现输出轴的无级调速。
调速机构中的勺管,由电动执行器通过简单的机械机构驱动。电动执行器接受标准电流信号,将其转换成相应的转角输出,因此,调节转速实际上是调节控制系统的输出模拟量信号,西门子S7一200PLC满足这一主要功能要求。
2 测控对象
1)转速调节系统
该系统最主要的测控对象是液力偶合器输出轴的转速。调速原理如图2.1所示,利用液位变送器,将反应锅炉水位的模拟量信号送给控制系统,同时利用测速变送器,将输出轴转速也反馈给控制系统,依据设定的PID控制算法计算后输出电流信号,电动执行器将之转换成相应的输出转角,通过调节机构驱动勺管移动,其开度对应锅炉水位要求的泵轮转速。

2)工作油系统
液力偶合器工作腔内介质油的最佳工作温度为60°~70°C,油温高虽然有利于能量的传递,但过高反而有害无益,因此要限制工作油温度范围为35~100°C,采用铂电阻温度传感器,当油温高于110°C时报警,当油温高于130°C时停止主电机运行。另外在工作油冷却器入口和出口分别设置温度传感器,将入口油温度控制" title="温度控制">温度控制在60~100°C,将出口油度温控制在35~75°C。
3)润滑油系统
高转速、大功率液力偶合器带有滑动轴承,其润滑油系统独立于工作油系统,因此在输入轴、中间轴、输出轴等处设置6个铂电阻温度传感器,测量滑动轴承温度,避免温度过高使润滑性能变差,烧坏轴瓦。限定润滑油温度范围在35~85°C,当油温高于90°C时报警,当油温高于95°C时停止主机运行。另外在润滑油冷却器入口和出口分别设置温度传感器,将入口油温度控制在45~65°C,将出口油温度控制在35~55°C。
为防止压力过低供油不足而造成润滑情况恶劣,限定润滑油压力范围在0.2~0.3Mpa,监测母管油压,当油压低于0.1Mpa时报警,并且启动辅助油泵,低于0.05Mpa则必须停止主电机运行。另外还要限定滤油器进出口压力差不超过0.6Mpa 。
3 硬件组成
反映系统状态的主要参数是水位、转速、油温、油压等物理量,选用各类变送器转换为4~20mA的标准电流信号,共计14路模拟量;各电机、阀门、报警指示灯等开关量输入输出共30点,因此系统的配置不甚复杂。采用西门子S7一200系列小型机控制,一旦发生故障影响面小、容易查找。
首先选用CPU226模块,具有24点输出/16点输入,可连接7个扩展模块,提供1000mA的总线电流,并且具有32位浮点运算功能和内置集成的PID调节运算指令,非常适合液力偶合器调速的锅炉供水系统。
其次扩展EM231模拟量输入模块(4路模拟量输入,消耗DC5V电流为10mA)3块;扩展EM235模拟量输入输出模块(4路模拟量输入/1路模拟量输出,消耗DC5V电流为10mA)1块,通过DIP开关进行设置,输入输出端口时能够自动完成A/D和D/A的转换,即标准电流信号与一个字长(16bit)的数字信号的自动转换。系统总扩展模块数为4,CPU226的电源能满足所有扩展模块消耗DC5V总线电流的能力。
另外,CPU226本机集成了两个通讯口,其中一个使用 MPI协议,使液力偶合器作为从站,完成其控制系统与主站的通讯;另一个用于TP070显示器接口,作为本机系统的显示界面[2]。
4 控制程序
控制程序采用主程序、子程序以及中断程序来编写。主程序完成电机、油泵启停等开关量逻辑控制以及温度、压力等主要模拟量监控和报警;子程序SBRO~SBR11传递工作油温控制参数、润滑油温度、压力、压差控制参数;主程序允许定时中断,进入中断服务程序执行含有PID指令的一段程序,对输出轴进行调速控制。
1)主程序
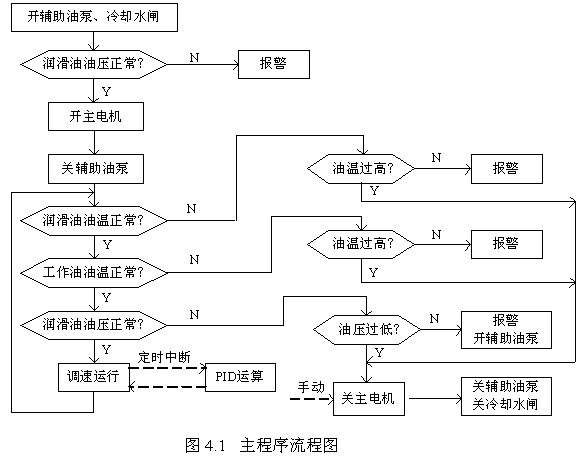
为了保证液力偶合器正常工作,控制系统必须满足严格的的启动、运行和停止条件。既开机顺序为先启动辅助润滑油泵、开冷却水闸,再启动主电机;停机顺序为先停主电机,再停润滑油泵、关闭冷却水闸;运行工作条件为勺管调速构控制功能正常、油温和油压监测系统正常等[3]。 系统主程序流程如图4.1所示。
2)数字PID控制程序
根据液力偶合器的结构特性可知,机械-液力传动系统惯性较大,输出轴速度调节响应有一定的滞后性。正可运用S7-200PLC中的PID控制子程序,与EM235模拟量输入输出模块一起,提高系统的速度调节响应,改善系统的动态特性[4]。
PID控制器的设计是以连续的PID控制规律为基础的,sp(t)是依据锅炉水位确定的输出轴给定速度值, pv(t)为输出轴速度反馈量,e(t)=sp(t)-pv(t)为误差信号, c(t)为系统的输出量。PID控制算法的输出量如下式所示:

Mintal为输出的初始值,Kc为系统比例系数, Ti, Td为PID的积分、微分时间。
输出轴转速的PID闭环控制系统如图4.2所示,将上式数字化,写成离散形式的PID方程,则程序中实际的PID算式如下式所示:


上式中共包含九个参数,存储在36字节的PID回路参数表内,见表4.1。CPU226提供的PID回路指令, 其操作就取决于这九个参数,必须指定内存区内该参数表的首地址。在应用于PID指令之前,需要将参数转换为标准化的浮点数表示形式,转换的第一步是把实际值从16位整数数值转换为浮点数数值,第二步是将转换后的浮点数再转换成位于0.0~1.0之间的标准化数值。
表4.1 PID回路参数表

由于机械-液力传动系统惯性较大,本系统仅采用比例和积分控制,100毫秒中断一次,做PID计算,通过工程计算初步确定其增益和时间常数为Kc =2.5、Ti =60s、Td=0s、Ts=0.1s,进一步计算后可达到最优控制效果。
5 结论
基于西门子PLC的控制系统,实现了对液力偶合器主要运行参数的实时监控。通常,电厂锅炉配备两台以上的给水泵,结合蒸汽锅炉运行状态的自动监测,可以实现整个机组的在线监控、故障诊断和报警等,西门子PLC具有丰富的网络构建功能,因此液力偶合器控制系统尚有很大的可扩展性。
本文作者创新点在于:利用PLC的PID调节功能取代了原来电动执行器必需配备的勺管伺服放大器,加快了系统的响应速度。
参考文献:
[1]杨乃乔,姜丽英编著,液力调速与节能[M],北京:国防工业出版社,2000.5:2-5
[2]殷洪义,可编程序控制器选择设计与维护[M],北京:机械工业出版社,2004.3:143-147
[3]张雪平,PLC在锅炉风机控制中的应用[J],微计算机信息,2005.6:42-43
[4]西门子(中国)有限公司,SIMATIC S7-200可编程序控制器系统手册[Z],2004.6:2-5
