
出于对环境保护的考虑,预计更新的法规会不断颁布出来,以要求开发更加节能高效的家用电器,例如洗衣机或空调。迄今为止,只有少数几家供应商推出的专有解决方案,提供了尖端的电机控制技术,可支持能效更高、噪声更低的电器。不过,现在有了崭新的变化——得益于新一代数字信号控制器(DSC),以高成本效益方式实现高级电机控制算法已成为现实。
以要求通过改变电机速度来快速响应洗涤和漂洗过程的洗衣机为例。为了让洗衣机能够完成这一任务,设计人员需采用高级电机控制算法。在众多可用的高级电机控制技术中,场定向控制(FOC)技术脱颖而出,它可帮助人们设计节能安静的洗衣机。假设读者已具有FOC算法的应用知识,本文从采用DSC实现基于FOC的无传感器PMSM控制开始,主要介绍如何在电器中实现基于永磁同步电机(PMSM)的无传感器FOC控制,以便为电器电机控制带来最大的成本效益。
对于无法部署位置或速度传感器的一些应用,无传感器FOC技术还可以克服一些由此产生的限制。例如,在一些压缩机应用中,电机充满机油会对线束布局有一些限制。在电器中采用PMSM电机时,由于PMSM电机转子上的永磁体产生的转子磁场是恒定的,所以可以提供极高的效率。此外,电机的定子磁场通过正弦分布的绕组产生。与感应电机相比,PMSM电机还具有极高的功率/尺寸比。与直流电机相同,它们的电气噪声也较低,因为它们不采用电刷。
为什么在电机控制中采用DSC?
DSC非常适合于洗衣机之类的电器,因为它们具有针对电机控制而定制的外设,例如脉宽调制器(PWM)、模数转换器(ADC)和正交编码器接口。在执行控制器程序和实现数字滤波器时,由于DSC能够在单周期中执行MAC指令和小数运算,所以可以帮助设计人员优化代码的执行。此外,对于需要饱和功能的运算,DSC提供了硬件饱和保护功能,可帮助设计人员避免发生溢出。
DSC 需要快速灵活的ADC来进行电流检测,这是电机控制中的一项关键功能。Microchip dsPIC DSC系列提供了这样的ADC,能够以1Msps的速率转换输入采样,可同时处理最多4路输入。这些ADC具有多种触发选项,支持采用低成本的电流检测电阻来测量电机相绕组电流。例如,可以通过PWM模块触发A/D转换,从而支持低成本的电流检测电路。在特定的时间,开关晶体管允许电流流入检测电阻,可在此时对输入进行检测。
采用的电机控制开发工具
本文讨论的FOC电机控制固件基于 Microchip的dsPICDEM MC1电机控制开发板。FOC算法采用Microchip的数据监视与控制界面(DMCI)工具进行测试和调试,该工具是MPLAB集成开发环境 (IDE)的一个模块。DMCI工具提供了快速的动态IDE,让设计人员可以用图形方式来表示应用反馈。例如,在DMCI的IDE中,程序符号(变量)可以动态地分配给滚动条、直接输入或布尔控件的任意组合,而IDE提供了对于这些符号(变量)的项目知悉导航功能。通过这些控件,用户可以在DMCI IDE中交互式地更改程序变量的值。此外,用户还可以动态地配置图形,以查看程序生成的数据。
在系统结构框图(图1)中,可以看到电机轴上没有安装位置传感器,但电机上采用了一些传感器来测量电流。这些传感器的电感电阻较低,它们属于逆变器功能模块的一部分。这里采用一个三相逆变器作为功率级,用来驱动电机绕组(图2)。
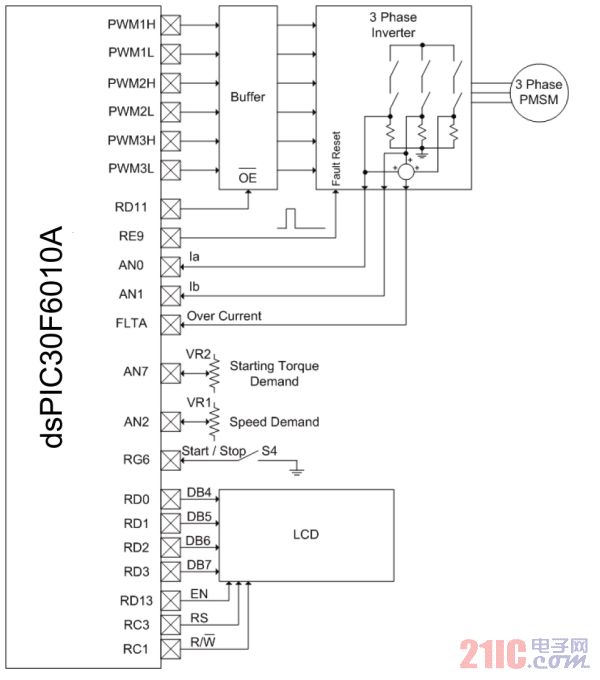
图1:USB界面专用充电器。
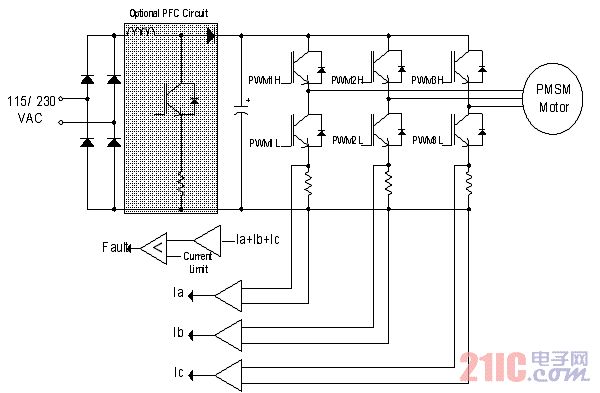
图2:三相逆变器驱动PMSM绕组。
FOC(或矢量控制)算法的简要步骤
以下总结了控制PMSM的FOC算法步骤。
1.先测量三相定子电流ia和ib。根据ia+ib+ic=0,计算来自两个电流传感器的电流。
2.将三相电流转换到2轴坐标系中。该转换根据测量的ia、ib和ic值得到变量iα和iβ。从定子的角度来说,iα和iβ是时变正交电流值。该步骤称为Park变换。
3.采用控制循环上一次迭代时计算的变换角旋转2轴坐标系,使之与转子磁通对齐。该转换根据iα和iβ得到变量id和iq。现在,将正交电流id和iq变换到旋转坐标系中。在稳态条件下,id和iq将保持恒定。该步骤称为Clarke变换。