
0 引言
随着科学技术的飞速发展,在军事、航空航天和测试及测量等领域,人们对数据采集系统的采样精度、采样率和存储量等指标提出了更高的要求。传统的采集器件使用起来很不方便,其局限性非常明显,显然已经不能适应现代技术发展的需要。目前,随着集成电路技术的进步,大规模和超大规模的可编程逻辑器件在实际系统设计中得到广泛的应用。由于其集成度高、功耗低、设计灵活、效率高等优势,同时器件具有用户可编程特性,可大大缩短系统设计周期,减少设计费用,降低风险投入,而且部分器件还具有在线可编程的能力。
在此介绍一种雷达中/视频数据采集记录系统,它的核心技术是利用高速可编程逻辑门阵列FPGA对雷达目标回波进行高速实时采集,并将持续采集来的信号数据记录在计算机硬盘上,以供后续数据处理需要。本系统的特点是:小型化,便于携带,连接方便,操作简单,记录时间长,采样率高,数据传输率高,动态范围大(12位A/D分辨率),并采用正交双通道采集方式,完全符合高速大容量雷达信号采集记录的需要。
1 系统组成与工作原理
系统主要由计算机和系统采集硬件组成,系统采集硬件由一块带有双路高速A/D和USB接口电路的底板和一块带有FPGA的核心板组成。雷达数据采集记录系统的工作流程如图1所示。

系统以台式PC作为采集主控设备,雷达中/视频回波信号经A/D转换器进行模数转换,再由FPGA控制的核心采集模块来完成数据的采集量化,采集模块可以根据来自雷达系统的时钟、同步触发信号来控制对雷达回波信号的采集,然后将采集到的数据通过缓冲模块送给USB,USB接口将数据打包传送到台式电脑的硬盘上以供显示和处理使用。
FPGA与上位机间的数据交换是实现系统功能的重要一环。一方面,FPGA在完成对采集数据的抽取和缓冲后,采用高速的USB 2.0传输方式将数据实时地传输给上位机,使数据处理能够顺序进行;另一方面,数据采集模块的某些参数由上位机控制面板设置后经总线传送给FP-GA。
2 硬件电路板设计
在本系统中,FPGA核心板担负着数据存储,数据传输控制的任务,是本系统最为关键的部分,综合考虑系统资源和FPGA价格,选择Xi-linx公司的Spartan-Ⅱ系列XC2S200芯片较为适宜,由电源转换芯片LT1764为FPGA提供稳定的电源电压。其最小系统框图如图2所示。

XC2S200是推出的性价比更好的Spartan-Ⅱ系列FPGA产品中的一款,有着成熟的Virtex-E架构,内核电压采用1.8 V,系统性能可达到200 MHz,系统门数为200 000系统门,内部包括适量的分块RAM(Block-RAM)。该芯片支持丰富的接口标准。本系统采用ADI公司的AD9224为A/D转换芯片,完成双路A/D采样功能。其采样频率为40 MHz,采用位数达12位,片内集成高性能的采样保持放大器和参考电压源,具有纠正错误输出的逻辑功能,精确提供了在40 MSPS采样率下12位的输出数据,保证在完全可以运作的温度范围内无漏码。
高速的数据采集速度是保证数据采集精度的标准,但往往在数据处理时并不需要以同样的速度来进行,否则对硬件的需求太高,成本也较高。这里采用同步FIFO、SRAM、异步FIFO相结合的方法实现了对采集数据的缓冲处理。同时,由于数据的传输速度大于AD的采样速度,保证了采集的数据在传输时无遗漏。
3 软件设计
3.1 FPGA程序设计
本系统采用了同步FIFO A、异步FIFO B和缓冲SRAM相结合的设计方法,共同构成本系统的数据缓冲模块。整个系统的详细设计流程如图3所示。
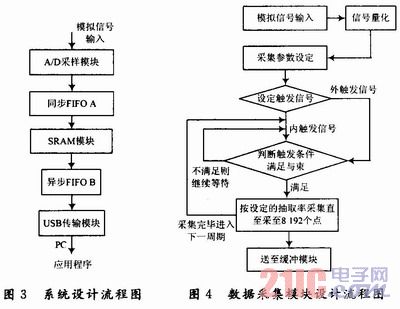
3.1.1 数据采集模块设计
雷达信号采集技术中,采集时序控制与实时数据传输是关键也是技术的难点所在。为保证采集的连续性,设计中采用了FPGA内部双FIFO的缓冲技术、外置专用缓冲芯片技术与计算机公用缓冲区环行存储技术。该模块的详细软件设计流程如图4所示。
3.1.2 数据缓冲模块设计
数据缓冲模块设计了同步FIFO A和异步FIFO B。其中FIFO A的一端接收A/D转换数据,另一端将数据传输给外部SRAM;FIFO B的一端接收SRAM的数据,另一端将数据传输给USB单片机的FIFO。
3.1.3 测频模块设计
基于传统测频原理的频率计的测量精度将随被测信号频率的下降而降低,在实用中有较大的局限性,而等精度频率计不但具有较高的测量精度,而且在整个频率区域能保持恒定的测量精度。综合考虑,本系统采用等精度频率计的测量方法。其基本流程图如图5所示。

3.1.4 测电压模块设计
采集信号经A/D变换器量化编码以后,可以根据量化得到的结果进行信号幅度值的计算。同时考虑到采集到的信号尤其是正弦波、三角波等信号在测量时会发生抖动,所以在进行电压测量时,采用了取平均值和对信号进行平滑处理相结合的方法提高测电压的精度,设计实现对信号峰峰值、平均值的测量。
3.2 应用程序设计
在设计上,当USB驱动程序安装好以后,应用程序调用线程获取该设备的有效句柄,进而就可以与WDM进行通信。接口数据格式的定义我们采用结构数据包的形式,首先设计一个C语言的结构,把要进行通信的参数按照与VHDL语言相同的顺序排列,然后在USB通信协议上,对这些参数进行数据包格式的设定。设计采集数据的存放问题时,我们调用线程把传送来的数据数组按照“*.dat”的数据格式进行存储,在回放显示时,把数据从“*.dat”中读到预定义的数组中进行调用,整个应用程序的设计流程如图6所示。
设计虚拟仪器的主要工作就是编写应用软件,在此采用Visual C++进行了控制面板的设计。考虑到信号参数的设置把面板分为2大部分:采集参数设定部分和显示控制部分,其中,前者的主要功能是把参数传到硬件核心处理部分。而后者的主要功能是负责面板上NTGraph控件显示参数的设置,应用程序控制及显示面板如图7所示。

4 系统调试和测试
在完成了系统的硬件设计和软件设计以后,需要进行综合调试和测试。通过调试,不断优化程序代码,对程序中的问题及时更正修改,使系统的性能得以提高,工作状态更加稳定。测试的过程中可以修正电路中元器件的参数等,以免理论分析与实际状态的差距引起系统的参数不符合要求。目前,本系统可以实现对多种型号的雷达进行实际外场数据采集。图8,图9分别为本系统采集到的某部岸基对海警戒雷达(全相参脉冲压缩体制)的单路中频(未经脉冲压缩处理)和双路正交视频(经过脉冲压缩处理)回波信号。

实验表明该系统完全满足所提出的指标要求,能够做到大容量高速连续采集,而且稳定可靠,采集所得到的数据可以满足信号处理和目标识别的要求。
5 结语
研究了雷达中/视频数据采集与回放系统的总体方案,即由信号调理模块、核心采集模块、缓冲模块、传输模块和应用程序显示模块组成。FPGA与上位机间的数据交换通过USB 2.0接口实现,并运用虚拟技术,采用了Visual C++语言设计系统的计算机实时显示界面。设计中运用硬件描述语言对FPGA进行编程,在完成了对输入信号的采集和记录的同时,实现了对输入信号的防抖动、过零检测、等精度测频及电压最值、峰峰值和平均值的测量,使得该系统能对信号参数进行准确测量。该系统被封装于一个小型的屏蔽盒内,非常便于携带,可方便应用于外场雷达的数据采集。