
随着精确制导技术的不断发展,导弹应具有直接瞄准目标并打击其要害部位,这就要求雷达不仅能对目标整体进行测量、跟踪,而且还要从角度上分辨出目标不同的部位,因此雷达必须具有很高的测角精度。但是当高分辨导引头雷达接近目标时,角闪烁成为雷达测角的主要误差来源,因为此时目标不再是点目标,而是由几个强散射中心组成的分布式目标,回波信号由这些散射中心的回波矢量合成,这个合成等
效为一个视在中心的结果,中心位置就是实际测量的位置。随着目标相对运动,散射中心的反射不断变化,导致回波相位波前面的畸变,波前在接收天线口径面上的倾斜和随机摆动从而产生测角误差,这种现象称为“角闪烁”,严重时角闪烁将会导致跟踪点偏离到目标之外。因此角闪烁抑制问题是导引头雷达必须解决的问题。
国内在高分辨雷达角闪烁抑制方面作了许多研究,提出了基于和差通道距离像的单脉冲测角,但是这种算法中没有考虑天线方向的影响,测角精度不高。本文基于此并对其不足有所改进,从高分辨雷达角闪烁产生的根本原因入手,提出一种基于高分辨雷达测角算法。该算法在测角前首先对目标回波信号和差通道进行一维成像,然后根据单脉冲雷达测角原理得到目标在各个距离单元的角度信息,最后通过加平均处理得到目标几何中心空间角度。
1 高分辨雷达的角闪烁特性分析
线性调频步进信号是高分辨雷达常用的一种形式,该信号是把步进频率中的常载频子脉冲换成线性调频子脉冲,其优点是保持步进频率信号能量和总带宽不变的同时减少步进阶梯的周期数,从而提高了系统数据利用率。信号的表达式为

其中,![]() 为基带线性调频子脉冲;线性调频子脉冲个数为N;Tr为子脉冲重复周期;Tp为时宽;子脉冲带宽BN=B/N;调频斜率K=BN/Tp。相邻子脉冲间的载频增量为△f;第一个子脉冲的中心频率为fo;则第i个子脉冲的中心频率为fci=fo+iBN;其中i=0,1,2,…,N-1。
为基带线性调频子脉冲;线性调频子脉冲个数为N;Tr为子脉冲重复周期;Tp为时宽;子脉冲带宽BN=B/N;调频斜率K=BN/Tp。相邻子脉冲间的载频增量为△f;第一个子脉冲的中心频率为fo;则第i个子脉冲的中心频率为fci=fo+iBN;其中i=0,1,2,…,N-1。
毫米波雷达发射信号波长远小于目标尺寸,工作在目标光学区,后向散射回波可以认为目标上强散射中心回波合成。设目标上有M个散射中心到雷达的径向距离分别Rk,k=1,2,…,M,不考虑目标和导引头之间相对运动,则第i个子脉冲回波为

式中,Tk=2Rk/c为第k个散射点延迟,将回波信号与本振信号混频,输出视频信号为

由式(3)可以看出,调频步进信号视频回波由两部分组成,信号处理可以分为两个步骤:首先在各个PRT内进行线性调频信号脉冲压缩,其次对压缩后进行PRT之间的IDFT处理。
不考虑目标和导引头之间的相对运动,线形调频信号![]() 的脉冲压缩结果为
的脉冲压缩结果为
取采样时刻为t=iTr+τk可得采样后第i个子脉冲的回波输出为
这样就实现了对N个脉冲串的压缩,合成一个大带宽脉冲信号,其总带宽B=N△f,距离分辨率为△R=c/2B。当△R目标径向尺寸时,IDFT处理所得的序列幅度{x(m)| m=1,2,…,M}反映了目标上强散射中心的雷达散射截面积在径向距离轴上的投影分布,称为目标的一维距离像。
2 高分辨雷达的角闪烁抑制
高分辨雷达由于在和、方位差、俯仰差3个通道都实现了高分辨处理,因此在3个通道均可以得到目标高分辨距离像。以方位差通道为例,设目标上有M个散射中心,第i(i=1,2,…,M)个散射中心的强度为ui,和通道目标距离像用于目标检测,如果在和通道检测到目标,则根据单脉冲测角原理,把目标区域的通过和通道检测的目标谱峰所对应的距离单元的方位差通道一维像幅度用对应的和通道一维像幅度归
一化,就可以得到目标在该距离单元的方位角。即
![]()
式中,u∑(i)为和通道目标距离像第i个散射点的幅度;u△(i)是差通道目标距离像第i个散射点的幅度;Re表示取实部。F(θ)为雷达接收天线方向函数,用sin函数来描述
![]()
式中,θo为天线等信号轴指向;θk为波束最大值方向与等信号轴方向的夹角;F'(θ)为其导数。由此可以求得以距离单元m为变量的目标方位角度值,同样方法可以求出以距离单元m为变量的目标俯仰角度值。
目标谱峰检测的目的是为了去除弱散射截面距离单元对角度平滑的影响,使之不参与目标几何中心角度的估计过程。因为根据角闪烁原理,幅度越小的单元对应的角闪烁越大,最后经过加权平滑处理后目标径向几何中心的方位角为

式中,am为加权平滑算子,一般取线性加权算子W(am)=1。
高分辨距离像单脉冲测角算法步骤总结如下:
(1)回波信号高分辨出处理,得到3个通道的一维距离像。
(2)以和通道距离像用于目标检测,得到超过检测电平的距离单元数目m。
(3)对两个差通道的距离像用对应距离单元m处距离像幅度用和通道幅度进行归一化,得到θm。
(4)把各个距离单元处的角度数据合成为整个目标的几何中心角度θ。
3 仿真与实测结果分析
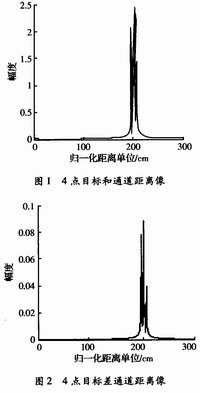
为了验证算法的有效性,设目标上有4个强散射中心,信号参数:带宽B=200 MHz,初始频率fo=60 MHz,脉冲个数N=20。目标参数:ri是第i个散射中心与雷达的相对径向距离,r=[196,198,200,202],单位:cm,θi是第i个散射中心相对雷达视线的方位角,θ=[0.0410,-0.010 2,0.019 0,-0.050],单位:弧度,所有散射点散射强度均相等均为1。根据以上一维成像算法可以得到目标和通道、差通道距离像分别如图1和图2所示。采用高分辨距离像测角算法测量的角度θ=[0.042 0,-0.014 2,0.020,-0.056],从以上可以看出测的目标角度与实际目标散射中心的角度是相当吻合,均匀加权后得到目标径向几何中心的方位角θ=-2.05×10-3。
下面以某导引头雷达对某飞机跟踪过程为例仿真,信号和目标参数如上,跟踪距离为390~210 m,目标在水平面内做匀速运动,目标上有4个强散射点。图3是分别采用点目标测角算法与高分辨测角算法得到的跟踪角度与目标真实角度值偏差比较,可以看出后者的误差远小于前者,已经处于目标尺寸范围之内。

4 结束语
从目标角闪烁产生的根本原因入手,分别在和差通道对回波信号进行一维成像处理后,通过高分辨测角算法求出其对应距离单元的方位角与俯仰角,然后将多个距离单元角度进行加权平均处理,得到目标径向几何中心对应的空间角度。仿真结果表明,能够很好地抑制角闪烁引起的角度测量偏差,是提高角跟踪精度的有效途径之一。