
使用GEO 卫星组网的某应用系统中,卫星信号的收发采用13 m 桁架式天线,以步进方式跟踪卫星。由于GEO 卫星轨道倾角较小(理论值为0) ,实际工作中定期通过南北保持将倾角控制在较小范围内,因而桁架式天线能够正常跟踪卫星。当GEO 卫星进入寿命末期,星上燃料不足,为节省燃料,卫星停止南北保持控制,导致卫星轨道倾角不断变大,步进跟踪模式无法正常跟踪卫星,导致系统部分重要参数不能满足系统设计指标,影响系统提供正常服务。
1 步进跟踪方式
步进跟踪是桁架式天线跟踪卫星的方式,该方式基于GEO 卫星遥测信号中的AGC 电平来判断天线是否对准卫星。当遥测数据的AGC 电平低于设定值时,天线以步进方式向上下左右4 个方向调整天线指向,并监测AGC 电平是否达到峰值,若到达峰值,说*线已对准卫星。
卫星转发器出站通道螺旋极电流是判断天线是否对准卫星,以及卫星出站信号波束覆盖范围内信号质量的一个重要参数,当天线准确对准卫星时,螺流值保持稳定。随着GEO 卫星轨道倾角的进一步变大,天线每次调整时都会导致螺流的大幅度波动,图1 是天线步进跟踪模式下卫星倾角变大后螺流一天的变化情况。

图1 步进跟踪方式下卫星通道螺流变化图
2 程序跟踪方式
针对步进跟踪模式存在的不足,提出了一种程序控制天线跟踪卫星的方法,称之为程序跟踪方法。
该方法利用卫星星历中卫星位置信息解算天线的指向,即方位角和俯仰角,并以指令的形式驱动天线控制单元(OCU) 控制天线跟踪卫星。
该方法采用轨道反推法,根据卫星星历精确计算地面天线指向,在实现过程中有其中2 个关键问题需要研究解决,分别是天线指向的计算、控制天线跟踪卫星的策略。
系统采用地球同步轨道卫星,所以首先考虑使用地球同步轨道卫星地面天线计算公式来计算地面天线指向。在天线指向计算过程中,已知量是卫星星历数据中卫星的位置和天线所在地面的经度和纬度。
已知量: ①卫星星历数据中卫星X 位置信息、卫星Y位置信息和卫星Z 位置信息3 个参数; ②系统地面天线地面位置经度和位置纬度。
(1) 解算卫星经度
卫星星下点经度:

(2) 解算地面天线指向
对准静止卫星时地面站天线主波束的方位角和俯仰角的计算公式推导:设地面站A 的经纬度为φ1和θ1 ,静止卫星S 的星下点S′的经纬度为φ2和θ2 。
φ= φ2 - φ1为星下点S′对地球站A 的经度差。RE为地球半径(6 378 km) ; hE 为卫星离地面的高度;α为地球站A 与星下点S′在地球面上的大圆弧所对的地心角。
利用几何学和球面三角学的一些基本公式,不难求出:当A 站天线对准卫星S 时,其仰角φe 、方位角φa 与经度差φ、地面站纬度θ1 的函数关系为:

用球面三角学的余弦定理可得:

因此可得:

对于静止卫星而言:

根据上述对准静止卫星时地面站天线主波束的方位角和俯仰角的计算公式推导,可以确定:
方位角计算公式为:

俯仰角计算公式为:
得到天线的方位和俯仰值,对解算获得值进行修正后和步进跟踪时天线指向数据进行比较, 发现计算精度只能达到0. 1°,不能满足使用要求。
通过进一步研究分析和试验,发现问题是由于GEO 卫星轨道倾角变大后,卫星轨道倾角超出了静止轨道卫星正常工作时设计指标要求, 因此研究中需将卫星看作非静止轨道卫星, 在此前提下研究天线指向计算方法。
设φe 为天线俯仰角, φa 为天线方位角,其计算公式为:
利用此公式解算获得天线的指向数据跟实际天线指向数据进行比较,所得数据精度为0. 01°,满足使用要求。
此公式中,由于要使用到卫星的星下点经维度,首先要利用坐标转换将卫星星历数据XYZ 转换成BLH 坐标。计算公式如下:
式中, N 为椭球面卯酉圈的曲率半径; e 为椭球的第一偏心率; a 、b 为椭球的长短半径; f 为椭球扁率;W 为第一辅助系数。
3 天线跟踪策略
天线跟踪策略主要研究天线指向调整指令的发送时机。步进跟踪方式中调整的判别依据有2 个:
一是预先设定跟踪频度,当达到设定的时间节点时,进行步进式跟踪; 二是当AGC 电平低于门限值时,进行步进式跟踪。由于GEO 卫星相对地球静止,在一段时间内偏离角度较小,因而设置30 min 的频度就能较好地保证天线对卫星的跟踪。AGC 电压在轨道倾角较小的情况下具有相对平稳性,卫星倾角变大后波动较大, 造成系统频繁启动步进跟踪,30 min的频度间隔已不能满足系统稳定工作的要求,且13 m 桁架式天线频繁跟踪卫星会加大天线的磨损,降低天线使用寿命。因此,频度设置需要考虑天线调整次数与系统稳定性之间的矛盾。调整过于频繁,则会加大桁架式天线的磨损;若调整时间间隔过大,则影响系统参数的稳定性,系统不能稳定工作,为了解决这一矛盾,提出采用程序跟踪、档位和控制频度相结合的控制模式。档位的含义是: ,其其中ΔAZ 为方位角的计算值与实际值的差值,ΔEL 为俯仰角的计算值与实际值的差值。档位与天线波束偏离卫星可接受的偏差角度有关,即与天线波束偏离卫星所造成的卫星接收功率下降的可接受程度有关。依据该天线特性,天线的3 dB 半波束宽度为0112°,2 dB 半波束宽度为0110°,1 dB 半波束宽度为0108°。如果将门限θ设置为0112°、0110°或0108°,卫星接收上行功率对应下降3 dB、2 dB、1 dB。控制频度是天线调整的时间间隔,根据不同卫星的状态确定不同的控制频度,并通过试验找到最佳的控制频度。
,其其中ΔAZ 为方位角的计算值与实际值的差值,ΔEL 为俯仰角的计算值与实际值的差值。档位与天线波束偏离卫星可接受的偏差角度有关,即与天线波束偏离卫星所造成的卫星接收功率下降的可接受程度有关。依据该天线特性,天线的3 dB 半波束宽度为0112°,2 dB 半波束宽度为0110°,1 dB 半波束宽度为0108°。如果将门限θ设置为0112°、0110°或0108°,卫星接收上行功率对应下降3 dB、2 dB、1 dB。控制频度是天线调整的时间间隔,根据不同卫星的状态确定不同的控制频度,并通过试验找到最佳的控制频度。
在跟踪过程中,天线的实时指向数据将通过网络反馈到控制软件,与解算出的天线指向数据进行档位的计算,结合频度形成控制策略。控制流程如图2 所示。
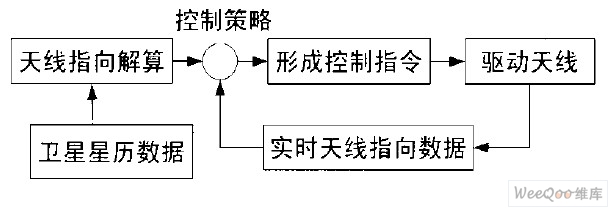
图2 程序跟踪控制流程
根据以上分析,采用0. 08°、0. 10°、0. 12°3 个档位进行跟踪试验,则天线的调整频度最快分别为10 min/ 次、13 min/ 次、15 min/ 次,为减少对天线的磨损,选取0. 15°、0. 12°两个档位进行试验。
(1) 档位为0. 15°
卫星螺流值最大为3. 24 mA ,最小为1. 1 mA。另一个通道螺流值最大为3. 75 mA ,最小为1. 00 mA。
卫星由北向南过赤道时螺流变化率最大,天线调整频度为16 min/ 次。试验期间螺流变化示意图如图3所示。

图3 档位0. 15°时螺流一天内变化图
(2) 档位为0. 12°
卫星螺流值最大为3. 24 mA ,最小为2. 02 mA。
另一个通道螺流值最大为3. 75 mA ,最小为1. 7 mA。
卫星由北向南过赤道时天线调整频度为13 min/ 次。
试验期间螺流变化示意图如图4 所示。
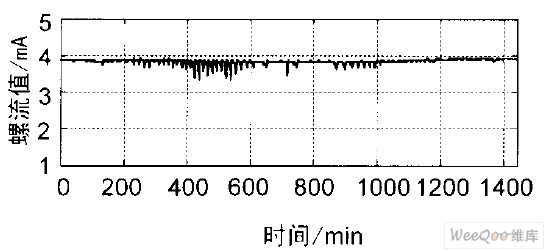
图4 档位0. 12°时螺流一天内变化图
对比上述2 次跟踪试验,档位较小时,天线控。
制频繁,螺流变化区间较小。为了确保系统的稳定运行,螺流值要大于2. 00 mA。针对目前卫星的轨道倾角,通过试验确定档位0. 08°,时间频度20 min为最佳调整策略。
4 试验结果
试验前对天线控制系统部分功能及软件进行修改,使之能够采用程序跟踪的方法,然后将以上提出的桁架式天线跟踪方法用程序实现并接入系统。经试验,系统螺流、AGC 电压等各项参数工作正常,天线调整次数大幅减少,每次控制天线跟踪卫星时都能一步到位。档位设定为0. 08°时一天内跟踪变化如图5 所示。
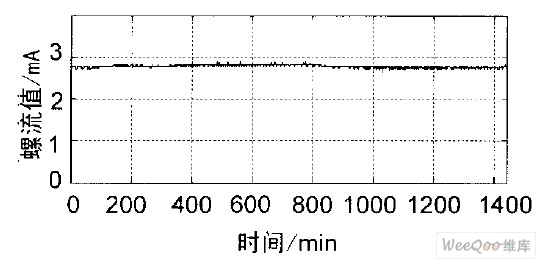
图5 档位0. 08°时螺流一天内变化图
5 结束语
GEO 卫星轨道倾角增大后,卫星螺旋极电流等参数每天变化区间较大,抖动现象严重,约20 min螺流超低报警一次(报警门限2. 0 mA) 。天线采用现有的程序跟踪模式后螺流变化区间明显收敛,且没有大幅抖动现象。天线调整次数大幅减少,且一次调整到位,提高了天线使用寿命。特别是在卫星轨道倾角已超过±2. 5°的情况下,使用该方法仍然能够满足天线正确跟踪卫星的各项设计指标,确保了系统在卫星寿命末期稳定可靠运行。