
引言
随着电子技术的发展,汽车电子化程度不断提高。安全、便捷、舒适、无污染、经济性一直是汽车工业和用户追求的目标。实现这些目标的关键在于汽车的电子化和智能化,先决条件则是各种信息的及时获取。
汽车在行驶过程中的各种路况信息是非常复杂的。在行驶过程中可作为刚性特征体来考虑,将三轴加速度计放在被测车体的某个特征点上,就可准确地采集到该特征点运动过程中在x轴,y轴,z轴的三个加速度分量。结合车体总质量可以计算出车辆的瞬时受力情况;结合车辆即时速度,可以计算出瞬时功率。采集和计算出的运动参数等信息可以进行本地的控制处理。同时,本系统支持CAN总线接口,利用该接口,可以将得到的数据发送到汽车计算机控制系统进行综合分析处理。从而使本系统可以广泛应用于汽车自动变速器,汽车安全气囊(Airbag)、ABS防抱死刹车系统、电子稳定程序(ESP)、电控悬挂系统等方面。
1 方案总体设计
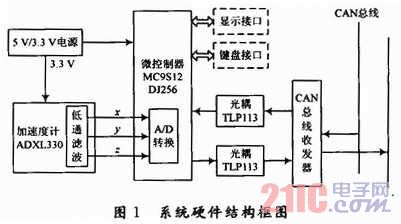
该采集平台需要解决数据采集、计算及通信的问题,而且由于应用环境的复杂性,需要保证系统的抗干扰性及可靠性。系统硬件结构框图如图1所示。主控制器通过ADXL330采集三个坐标轴上的加速度分量,经过分析计算后提供给本系统直接应用或通过CAN总线提供给别的应用者。
2 建立汽车运动模型
汽车在路面上的运行环境是非常复杂的,受到的振动频率分布很宽,一般情况下车辆的振动频率范围可分为如下几种情况:
刚体运动:0~15 Hz;
结构振动,板件共振:15~150 Hz;
噪声及啸鸣:150 Hz以上。
汽车典型的共振频率范围通常为:
车身共振频率:1~1.5 Hz;
车轮跳动:10~12 Hz;
座椅上的乘客:4~6 Hz;
悬置的动力总成:10~20 Hz;
结构共振频率:大于20 Hz;
轮胎共振频率:30~50 Hz和80~100 Hz。
在研究车辆的运动时,主要研究的对象一般包括车辆的运动速度、运动位移、瞬时加速度、瞬时功率、瞬时驱动力等。而以上各项参数,均可通过对被测点的加速度计算得出。车体在空间位置的加速度如图2所示。

车辆瞬时驱动力F=ma。其中,F为车辆的瞬时驱动力;m为车体总质量;a为运动加速度。
速度![]() 。其中,v为运动速度;v0为初始速度;
。其中,v为运动速度;v0为初始速度;![]() 为加速度对时间的积分。
为加速度对时间的积分。
瞬时功率P=Fv。
ADXL330是一个三轴(x轴,y轴和z轴)模拟输出的加速度传感器,通过ADXL330能够测量出任意时刻三个方向的加速度分量。通过测量得到的加速度分量可以计算出车辆的运行状态,动力学参数等信息。
3 硬件设计
3.1 电源设计
汽车的用电设备所需电能有两个来源:发电机和蓄电池,输出的额定电压为12 V。本设计中采用LM2575开关稳压器和LM1117低压差线性稳压器将12 V输入电压转换为5 V和3.3 V的供电电源。电源设计原理图如图3所示。
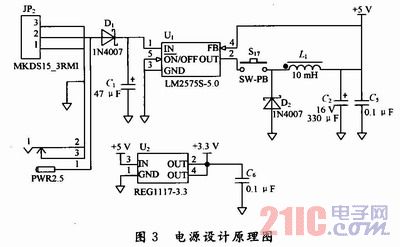
LM2575是美国国家半导体公司生产的1 A集成稳压电路,电压输入范围宽为7~40 V,电流输出最大可达1 A;同时内部有完善的保护电路,包括电流限制及热关断电路等。
LM1117为低压差线性稳压器,其压差典型值仅为1.2 V,输出电压精度高达±1%。输出的3.3 V电源提供给主控制器使用,为保证电源系统的稳定性,输出端需要添加一个10μF的钽电容来改善瞬态响应和稳定性。
3.2 主控制器电路设计
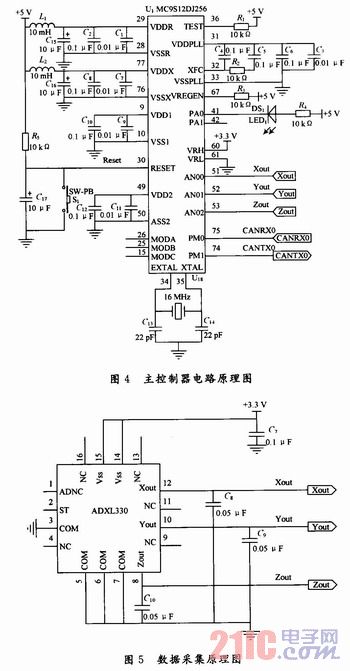
系统主控制器采用MC9S12DJ256单片机,它是Freescale公司基于16位HCS12内核制造的高速、高性能、低功耗的芯片。它使用了锁相环技术和内部倍频技术,使内部总线速度大大高于时钟产生器的频率,在同样速度下所使用的时钟频率较同类单片机低很多,因而高频噪声低,抗干扰能力强,更适合于汽车内部恶劣的环境。
MC9S12DJ256单片机的主频高达25 MHz,同时片上还集成了许多标准模块,包括2个异步串行通信口SCI、3个同步串行通信口SPI、8通道输入捕捉/输出比较定时器、2个10位8通道A/D转换模块、1个8通道脉宽调制模块、兼容CAN 2.0A/B协议的2个CAN模块以及一个内部I2C总线模块;片内拥有256 KB的FLASH E2PROM,12 KB的RAM及4 KB的E2PROM,资源十分丰富,可满足本方案设计要求。主控制器电路如图4所示。
3.3 数据采集电路设计
ADXL330支持对输出进行低通滤波。可以通过调整输出引脚接地电容的大小来设置。输出带宽主要是由RFILT,Cxyz的大小决定的。-3dB的带宽计算公式如下:
可简化为:
![]()
电阻RFILT的标称值为32 kΩ,位于芯片内部,偏差在±15%。Cxyz的最小值不能小于0.004 7μF。
由于汽车在路面上的的振动频率一般在1~100 Hz的范围内,则可选取滤波电容Cxyz的值为0.05μF,从而实现带宽为100 Hz的低通滤波。电路如图5所示。为了滤除供电电源产生的噪声,需要在加速度计的电源Vs和Com之间接一只0.1μF的电容。
3.4 CAN总线传输电路设计
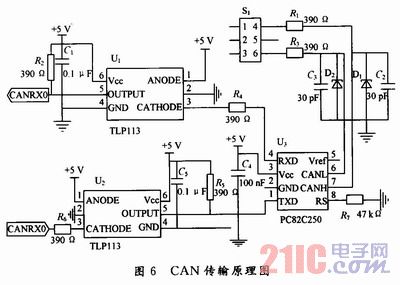
PCA82C250是CAN协议控制器和物理总线间的接口,可以提供对总线的差动发送和接收能力,与ISO11898标准完全兼容,并具有抗汽车环境下的瞬间干扰、保护总线的能力。它主要是为汽车中高速通信(高达1 Mb/s)应用而设计。为了增强CAN总线节点的抗干扰能力,MC9S12DJ-256的CANTX0和CAN-RX0并不直接和收发器PCA82C250的TXD和RXD相连,而是通过高速光耦TLP113隔离后再和PCA82C250相连,这样就可以实现各CAN节点间的电气隔离,提高系统的稳定性和安全性。其电路原理如图6所示。
4 软件设计
ADXL330的输出为模拟电压信号,可直接进行A/D采样。当电源电压发生变化时,输出的相关参数也会变化,本文电源电压为3.3 V,比率因子电压加速度比为330mV/g,加速度为0时的输出电压约为0.5Vs(Vs为电源电压)。所以,将x轴输出信号Xout,换算成对应加速度ax为:

由于传感器在使用中会存在随机干扰,这些干扰会影响测量精度。本文采用简单的平均值滤波法降低干扰对系统的影响,取最近5次采样的平均值为最终采样值,采样流程图如图7所示。

报文的收发由CAN控制器根据CAN协议规范自动完成。由于MC9S12DJ256的CAN控制器拥有3级缓冲,所以可以发送多组数据完成实时操作。需要发送数据时,CPU根据TXEx位来确定可用的缓冲区,然后将报文写入发送缓冲区,并置位控制寄存器中的发送标志;由CAN控制器自动完成发送。CPU收到报文时会触发中断,在中断处理函数中将接收到的报文写入接收队列。CAN收发流程如图8所示。
5 结语
本文设计了一种基于加速度计ADXL330的汽车动力学参数采集平台,介绍了其软硬件结构。通过该系统,实现了与汽车运行相关的动力学数据的采集和计算。同时,采用高性能的控制器芯片使系统功耗低,计算性能高,运行稳定可靠。对系统进行较少的改动就能很好地应用于汽车自动变速器、汽车安全气囊(Air-bag)、ABS防抱死刹车系统、电子稳定程序(ESP)等方面,具有很强的技术适用性和开发前景。