
1. 绪论
在开关模式的功率转换器中,功率开关的导通时间是根据输入和输出电压来调节的。因而,功率转换器是一种反映输入与输出的变化而使其导通时间被调制的独立控制系统。由于理论近似,控制环的设计往往陷入复杂的方程式中,使开关电源的控制设计面临挑战并且常常走入误区。下面几页将展示控制环的简单化近似分析,首先大体了解开关电源系统中影响性能的各种参数。给出一个实际的开关电源作为演示以表明哪些器件与设计控制环的特性有关。测试结果和测量方法也包含在其中。
2. 基本控制环概念
2.1 传输函数和博得图
系统的传输函数定义为输出除以输入。它由增益和相位因素组成并可以在博得图上分别用图形表示。整个系统的闭环增益是环路里各个部分增益的乘积。在博得图中,增益用对数图表示。因为两个数的乘积的对数等于他们各自对数的和,他们的增益可以画成图相加。系统的相位是整个环路相移之和。
2.2 极点
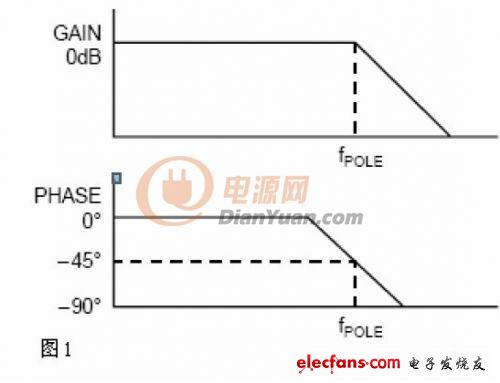
数学上,在传输方程式中,当分母为零时会产生一个极点。在图形上,当增益以20dB每十倍频的斜率开始递减时,在博得图上会产生一个极点。图1举例说明一个低通滤波器通常在系统中产生一个极点。其传输函数和博得图也一并给出。

2.3 零点
零点是频域范围内的传输函数当分子等于零时产生的。在博得图中,零点发生在增益以20dB每十倍频的斜率开始递增的点,并伴随有90度的相位超前。图2描述一个由高通滤波器电路引起的零点。
存在第二种零点,即右半平面零点,它引起相位滞后而非超前。伴随着增益递增,右半平面零点引起90度的相位滞后。右半平面零点经常出现于BOOST和BUCK-BOOST转换器中,所以,在设计反馈补偿电路的时候要非常警惕,以使系统的穿越频率大大低于右半平面零点的频率。右半平面零点的博得图见图3。


光耦电路把误差放大网路产生的误差信号传输到主边。AS3842 PWM电路把这个误差电压与通过主边功率变压器的电流进行比较。然后功率场效应管的占空比被调制,以提供足够的电流到副边来维持想要的输出。
光耦的小信号传输函数是与光耦的电流传输比成比例的固定增益。R5(原文误为R6,式5一并改为R5,译注)是与光耦的二极管串联的限流电阻,并且是AS3842误差放大器的输出阻抗(此句应该理解为R5是这个AS3842开关电源电路中,误差放大器部分的输出阻抗,译注)。这一点在应用文档“Secondary error amplifier with the AS431”中有深入的阐述。从误差放大器的输出到AS3842的COM脚的传输函数是:

VCATHODE是AS431的阴极电压,也就是误差补偿放大器的输出电压。CTR是光耦的电流传输比。R5(原文为R6,译注)是与光耦的二极管串联的限流电阻。RCOMP是AS3842的COMP脚当其试图拉电流超过它的最大输出电流时的输出阻抗。
当误差信号传递到补偿脚以后,将其与电流检测信号比较。图9表示一个电流检测比较器和开关部分的简单框图:
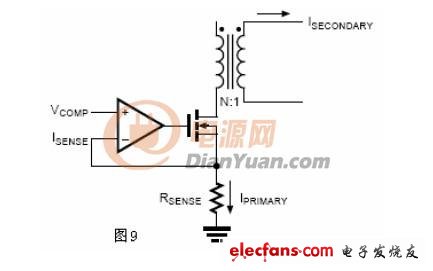
在闭环系统中,VCOMP与ISENSE维持同样的电平。因此,IPRIMARY被VCOMP有效的调节:
从ISECONDARY以后(见图9),副边电流或者说输出电流与主边电流成比例,把等式(4)重新排列表示出副边电流与VCOMP之间的关系。结合等式(3)和(6)得到PWM部分的传输函数:传输函数G2(s)仅包含增益没有相移。
4.4 误差放大器补偿网络G3(S)
一旦输出滤波器和PWM电路部分的传输函数确定下来,然后可以设定误差放大器补偿网络以取得最优化的系统性能。图10例举出一个在低频时提供高的频率滚降和高增益的补偿方案。这个补偿方案有一些很好的特性适合于误差放大器的补偿,它有很高的直流增益和易控的滚降。
4.5 整个系统
因为这是一个线性系统,可以用叠加的方法得到整个系统的传输函数。通过把整个环路各部分的增益和相位叠加起来,产生整个系统的博得图。通过放置补偿网络的极点和零点使系统的性能最优化。图11把各部分的博得图结合起来,负反馈系统的180度相移也加入进来了。

5. 测量结果
构造一个150W的电流模式正激转换器,经过修正的小信号环路特性显示出它在系统瞬态响应时所起的作用。图13(原文误为图12,译注)给出它的增益-相位图。与图11所展示的一样,获得了相同的博得图曲线。此增益相位图显示这个系统有86.7度的相位裕量。意味着稳定的系统有快速的瞬态响应。图15(原文误为图13,译注)给出系统的瞬态响应。为了展示相位裕量的作用,通过增加整个系统的增益和提高穿越频率,系统的相位裕量会减少。穿越频率提高时系统的相位裕量在减少。图12(原文误为图14,译注)给出更高的穿越频率和更少的相位裕量(65度)时的系统博得图。其瞬态响应见图14(原文误为图15,译注),注意更少的相位裕量导致更大的振荡和更长的调节时间。表1比较了这两个不同增益大小的系统之间线性和负载调节率的变化。正如前面所述,高的环路增益得到更紧密的线性和负载调节率。还应该注意需在高的相位裕量和较低的环路增益之间取得平衡。
6. 测量方法
为了保证准确的结果,测试信号接入节点的阻抗必须大于它的输出阻抗。在图6的测试电路中,误差放大器在副边,PWM电路在主边。测试信号在光耦的输出和AS3842的VCOMP输入之前接入。输入阻抗是从VCOMP脚看入时的阻抗,输出阻抗是光耦的输出阻抗。在其他误差放大器和PWM电路没有隔离的应用中,测试信号可以在输出滤波电容之后接入,使其与误差放大器的输入相串联。