作 者:河南工业大学 尚凤玲 岳龙旺 田 勇 岳 威
引言
近20年来,在微创外科及其市场需求的驱动下,将先进机器人技术、计算机技术、控制技术、远程通讯技术、图形图像技术等有机结合起来的计算机辅助机器人微创手术系统得到了迅速的发展。与人类相比,机器人具有状态稳定、定位准确、灵巧性好、工作范围大、不怕辐射和病菌感染等优势[1]。这将给2l世纪外科手术领域带来一场新的技术革命。
微创外科手术是指外科医生在病人身体上开四个孔(1cm),一个用于插入内窥镜,另两个用于插入细长的手术工具[2],剩下的一个孔用于辅助操作。该技术可以实现手术的最少损伤、减少手术并发症、缩短手术后康复时间,降低医疗费用。因此,受到医生和患者的普遍欢迎,是外科手术发展的必然趋势,具有广阔的应用前景。
由于受到工作空间的限制,微创手术难度大,时间长。现有微创手术机器人系统都是基于传统“缠绕打结法[3,4]”进行缝合打结的。由于存在线圈从工具端部滑脱,张紧力不容易控制等问题,导致缝合线打结一次成功率低,手术时间长,缝合打结效果差。为了解决传统“缠绕打结法”不适合机器人缝合打结的问题,本文提出一种新型的适合机器人缝合打结的“扭转打结法”,基于该方法设计出新型的微创手术机器人系统。
扭转打结法
“扭转打结法”[5]既是通过夹持工具的旋转使缝合线产生扭转,同时扭转可以转化为绞拧,形成打结所需的圆环的打结方法。
用“扭转打结法”进行缝合打结的一般步骤如图1所示。
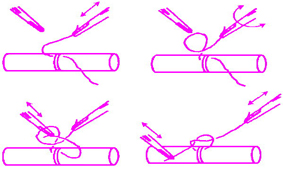
图1 “扭转打结”法打结过程
从图1中可以看出,采用“扭转打结法”在打结过程中,在缝合线两端夹持点相互靠近时,缝合线由“扭转”转化为“绞拧”;而当两夹持点相互远离时,缝合线由“绞拧”转化为“扭转”。通过末端工具电机旋转便能完成这个动作要求,且左右工具之间没有相对的位置与姿态的变化,因此不受工作空间大小的影响,也不会因缝合线的张紧力而损伤血管。
机器人系统机构设计
“扭转打结法”通过对缝合线施加端部扭矩实现缝合线形状的改变,形成打结所需的线圈,其运动形式包括沿轴向的往复运动、绕轴向的旋转运动和夹持工具的开合运动。为了防止误操作造成对病人的伤害,应该实现基于机构的定点运动。系统原理图如图2所示。
该系统为双臂机构,每个机械臂有5个自由度,分别为绕r轴、v轴、z轴的转动,绕u轴曲线移动和沿v轴的手术器械的直线移动。其中,z轴和r轴的转动为摆动,v轴的转动为手术器械回转。通过u轴和r轴实现基于机构的定点(切口)运动,通过v轴和z轴转动实现末端工作装置的姿态变化。
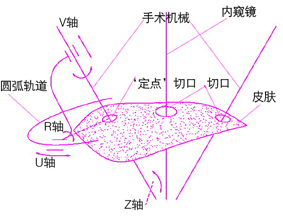
图2 机械臂结构原理
各部分结构的设计
u轴曲线移动和r轴摆动结构的设计
微创手术是通过体表切口将手术器械伸入体内进行手术的,为防止误操作造成对切口的损伤,系统应具备定点运动特性。在机构设计过程中,采用半圆弧轨道机构和轴直接驱动摆动机构实现系统的定点运动。
半圆弧轨道机构如图3,为实现“定点”运动,只要确保患者的体表切口位于圆弧轨道的圆心处即可。这种结构简单,容易实现,驱动机构可以选择具有传动准确、可靠、运转平稳、承载能力大、体积小、效率高等优点的齿轮传动。在圆弧轨道外侧表面上加工成齿形结构,把动力源放置于轨道上面的滑块上,小齿轮的运动带动滑块沿u轴曲线移动。
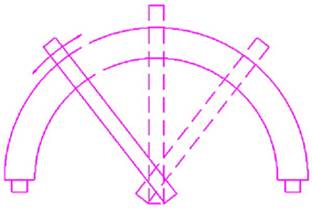
图3 圆弧轨道机构
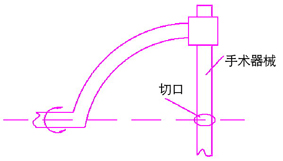
图4 轴直接驱动摆动机构
轴直接驱动摆动如图4,实现轴摆动的轴线过圆弧轨道的圆心即患者体表切口也可实现“定点”运动。
此机构的微型减速电机安置在滑块上,安装时要保证输出轴线过圆弧轨道的圆心,其结构简单,驱动方便。所以在实现绕r轴的转动中选用这种机构。
v轴移动结构的设计
可以实现直线运动的机构主要有:螺旋机构、曲柄滑块机构、有特定尺寸的四杆机构、链传动和齿轮-齿条机构等几种机构。
v轴移动要求手术器械做往复直线运动,结合各种机构运动特点,最后选用齿轮-齿条机构。
齿条的一端用微型圆锥滚动轴承连接在手术器械上,一端卡在套筒上,此机构手术器械便于拆装。
v轴转动和z轴摆动结构的设计
手术器械自身的回转机构设计:为了减轻手术器械自身的质量,以及体积限制,尽量选用结构比较简单的结构,并尽可能紧凑。v轴转动选用微型减速电机直接带动手术器械实现。微型减速电机安置在套筒上,再把套筒与齿条固连,如图5所示。
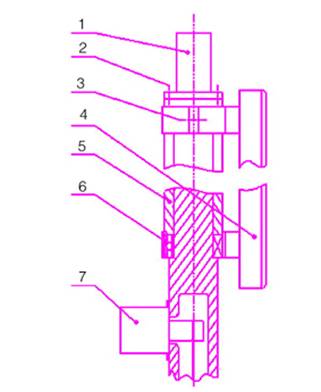
1—微型减速电机; 2、3—8xm1;4—齿条;
5—套筒;6—678zz轴承; 7—微型减速电机。
图5 v轴转动和z轴摆动
z轴摆动机构的设计:为了减少进入人体内手术器械的直径,把腕部的摆动控制系统设置在切口外部,这样使控制部分与腕部有一定的距离,可以采用丝传动来实现z轴摆动。不仅可以增加从手的精度和刚度,还能使从手结构紧凑、自重轻、刚度高。
为了防止机构运动时引起末端工具的开合及其姿态的变化,丝传动原理如图6所示。
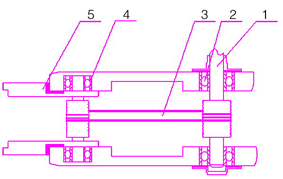
1—轴驱动轴;2、4—深沟球轴承;
3—钢丝;5—末端工具。
图6 走丝方法
运动学分析
运动学正解
按照d-h法严格建立杆件坐标系及各关节的参数,分别如图7和如表1所示。
表1 微创缝合机器人的d-h参数
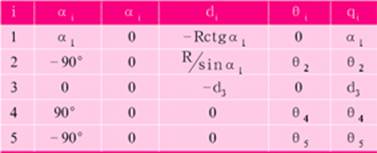
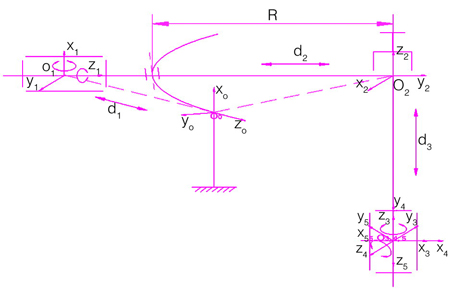
图7 微创缝合机器人结构
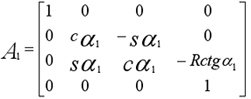
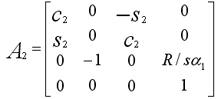
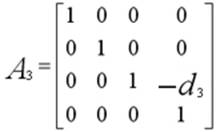
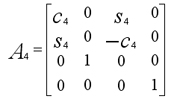
然后根据各关节参数以及通过matlab进行矩阵计算,可求得各杆系的转换矩阵以及机器人末端在基础坐标系中的位姿矩阵,如公式1-6所示。
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
机器人末杆在及坐标系中的位姿矩阵为
 (6)
(6)
其中

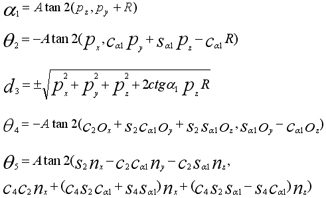
运动学方程逆解
根据正解结果,反求出机器人的各关节值。
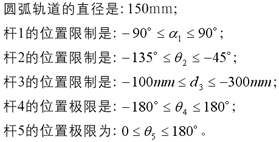
工作空间分析
通过工作空间分析,按照实际的手术空间要求,得出机构的参数。
结合运动学分析及实际情况,设置机器人各杆的尺寸及极限位置如下:
结论
本文在分析“扭转打结法”打结过程的基础上,设计了一种新型的微创缝合打结机器人,并详细阐述了机器人的运动学解算过程,结合实际给出了设置机器人各杆的尺寸及极限位置的参数。
作者简介
尚凤玲 河南工业大学在读研究生。
参考文献
[1] howe d,yoky matsuoka.robotics for surgery[m].london:biomed, 1999.
[2] 王田苗等. 医疗外科机器人的研究开发与产业化前景[j].机器人, 2000, 22(7):897~901.
[3] mayer, hermann; gomez, faustino; wierstra, daan.a system for robotic heart surgery that learns to tie knots using recurrent neural networks[j]. advanced robotics,, 2008, 22:1521-1537(17).
[4] t.asao, s.yamaguchi, s.tsutsumi.experimental results and early clinical experience with an easy method for intracorporeal knot tying using a novel laparoscopic needleholder[j].surgical endoscopy, 2007,21:1553-1556.
[5] 岳龙旺.外壳手术机器人缝合打结研究[d].天津:天津大学,2006.
