
摘要:提出一种高性能低成本的电动代步车控制器设计方案。该控制器以Atmel公司的AVR单片机为控制核心,H桥电路作为直流电机驱动器,使用者通过摇杆操控电动代步车的速度和转向。控制器的软件部分由系统自检、摇杆位置检测和电机运动3大部分组成,并灵活使用系统时标,事件触发机制和有限状态机等编程新方法,以确保系统的安全性和稳定性。实践表明,该电动代步车控制器能够实现多种故障诊断功能,电机启动和停止时运行平稳,摇杆操作灵活,系统整体性能良好,能够满足实际使用要求。
关键词:代步车;微处理器;直流电机;摇杆
本世纪将是一个人口老龄化程度越来越高的世纪,老年人和残疾人的护理将是社会的一个沉重负担。据老龄委统计结果显示,2004年底,中国60岁及以上老年人口为1.43亿,2014年将达到2亿,2026年将达到3亿,老龄人口的规模将越来越大。同时在我国人口中有8 296万残疾人,占全国总人口的比例为6.34%,其中肢体残疾人数2 412万,占29.07%。老年人和残疾人这个庞大的弱势群体需要一种适合他们心理和生理的代步车来满足日常生活及参与社会活动的需要。
随着科学技术的迅速发展和人民的生活水平的不断提高,手动轮椅逐渐被性能优越、操作简单、行驶安全的电动代步车所替代。电动代步车的出现除了能满足老年人或残疾人室内外活动的要求之外,还在医疗康复中发挥着越来越大的作用。例如,腿部骨折的患者可以在康复过程中使用电动代步车,那么即使腿脚不便也可以在一定的范围内自由活动。电动代步车作为医疗康复工具时也将增加若干功能,例如使用者可以通过调整座椅和靠背的角度,在电动代步车的帮助下实现平躺或站立等不同姿势。
电动代步车使用蓄电池作为能源,以直流电动机作为执行机构,安全可靠。老年人、残疾人或者康复者只需要控制摇杆就可以控制电动代步车的运动速度和方向,学习简单,操作方便,无需他人看护,这些特点可以很好的扩大使用者的运动空间,丰富他们的生活。
由于电动代步车的使用对象为老年人或残疾人,所以安全性尤为重要。控制器必须具有一定的故障诊断功能,能够自动排除故障或将故障所带来的后果减小到最低程度。为了造福万家,开发一款性能稳定、功能完善、价格低廉的电动代步车通用控制器尤为重要。
1 系统构成
电动代步车大致可以分为4类:室内型,庭院型,功能型和道路型。室内型电动代步车操作轻巧灵活,适于室内使用;庭院型电动代步车主要用作户外短距离代步使用;功能型电动代步工具主要满足医疗康复使用,功能较多;道路型电动代步车动力较强,适于在城市道路上较长距离行驶。本文主要介绍庭院型电动代步车。
电动代步车的机械结构延续了传统轮椅车的机械结构,体现出人性化,具有舒适性和便携性,同时为了配合电动代步车的特性,在传统的机械结构上加装了一些减震部件,使得运行更舒适平稳。
如图1所示,电动代步车主要由座椅、车架、驱动后轮、导向前轮、蓄电池、电子控制器构成。座椅固定在车架上,驱动后轮一般设置在座椅后部,转向前轮一般设置在椅座前部,蓄电池设置在椅座下方两个驱动后轮之间,电子控制器设置在椅座的扶手上。

图2为电动代步车控制器结构示意图,主要包括微控制器、电机驱动电路、摇杆检测电路以及人机对话接口等。为了有效保护和监控电机的运转,提高电动代步车的安全性能,还加入了电源电压检测接口、电机电流检测、充电器检测接口等功能。

2 硬件设计
2.1 微控制器
微控制器并不是功能越丰富越好,应遵循以下2条基本原则:一是微控制器的片内资源恰好能满足设计要求,灵活地使用片内资源可以减少外围扩展芯片的数量,也以减小电路板的面积;二是在满足功能的前提下,价格要尽可能的低。
本控制器采用Atmel公司的Atmgeal6(L)。该型号的单片机片内资源较为丰富,集成了EEPROM、A/D转换器、PWM等功能模块。EEPROM功能可以用于相关控制参数的掉电保存:PWM功能通过H桥实现对直流电机的调速控制;A/D转换功能可以实现直流电机的电流检测,同时也可以实现摇杆位置信息的采集。作为RISC精简指令的高速8位单片机,和51内核的单片机相比,在相同价格基础上具有运算速度上的优势。
2.2 电机驱动电路
电动代步车的2个驱动后轮分别由2个直流电机带动。直流电机由2个半桥驱动器IR2104控制的H桥功率电路进行驱动,即由4个功率MOSF-ET电路IRF1010N(VDSS=55 V,RDS(on)=11 MΩ,ID=85 A)组成电机的双向速度控制电路,如图3所示。当PWM2为低电平时,VQ3截止,VQ4导通,PWM1输入调速信号,电机正转;当PWM1为低电平时,VQ1截止,VQ2导通,PWM1输入调速信号,电机反转。

由于电机的额定功率较大,在设计电机相关驱动电路时,应注意过载保护和功率元件的散热问题。电动代步车通过左右电机差速运动实现各方向的运动,为了达到控制的协调性,电机的运动算法也需要通过试验不断修改。除此之外应考虑电机启动或停止时的加减速过程,保证运动的平稳性。
2.3 摇杆检测电路
摇杆是电动代步车最为重要的输入设备,摇杆既可以控制电机电源的打开和关闭,也可以控制左右两个电机的速度和运行方向。
控制器需要通过检测摇杆的位置来确定电机的运行速度,摇杆实质上是一个位置传感器,一个包含XY两个垂直方向的位置传感器。摇杆主要由4个位置固定的线性霍尔和4个可以移动的磁钢组成,若摇杆被推动,磁钢和线性霍尔的相对位置就会改变,线性霍尔的输出电压也跟着变化,控制器通过A/D转换器测量这4个电压值,以确定摇杆的位置。
线性霍尔的灵敏度越高,其输出电压值范围越宽,摇杆位置的分辨率也就越高,电动代步车的操纵性能也就越好,所以线性霍尔的选择非常重要。本控制器采用Honeywell的SS490系列线性霍尔,其灵敏度可达3.125 mV/G,可以满足要求。
2.4 人机对话接口
面板是重要的人机对话接口,包括功能按键接口,速度档位显示接口,蓄电池电量显示接口。前面板的设计原则是简洁美观、成本低,速度档位显示和电池电量显示均采用LED组成的光柱来显示这些值的变化情况。
面板功能键共有5个,分别是速度档位增加键,速度档位降低键,电源打开键,电源关闭键和蜂鸣器键;共有12个LED,其中速度档位显示5个,用于反映当前速度档位,蓄电池电量显示7个,用于实时显示蓄电池电量,提醒用户在电量过低时及时充电。
3 软件设计
3.1 程序结构
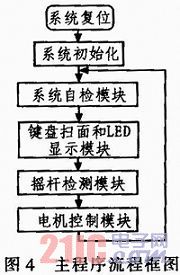
根据电动代步车的功能需求,将控制器软件划分为4个主要模块:系统自检模块、键盘和LED显示模块、摇杆检测模块以及电机控制模块。图4为控制器的主程序流程框图。
3.2 系统自检模块
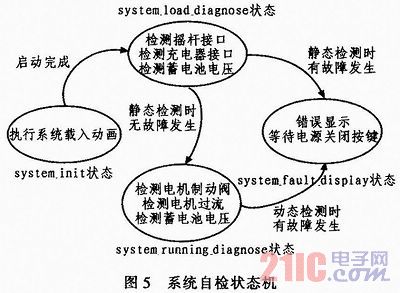
系统自检模块是电动代步车安全性能的关键,主要完成对自身运行状态和故障诊断,故障信息应及时处理并通过人机接口提醒用户。由于电动代步车的使用对象为老年人和残疾人,所以控制器的安全性尤为重要。系统自检模块主要完成如下任务:1)检查充电器接口;2)检查蓄电池电压;3)检查制动器接口;4)检查摇杆接口;5)显示故障状态。
为保障系统的稳定性和可靠性,自检模块采用事件触发机制。图5为系统自检状态机,这些功能函数每秒执行约100次。在系统自检函数中有若干自检标志,这些标志位初始值均是FALSE,如果在系统自检函数中被置成TRUE或者在其他模块中被置成TRUE,则说明故障发生,需要及时处理和对策。
3.3 摇杆检测模块
摇杆检测模块的主要功能是获取摇杆的位置参数,以计算左右驱动后轮的运转方向和PWM脉宽,摇杆位置参数是电动代步车的关键参数之一。摇杆检测模块的主要功能有:1)检测摇杆X方向的位置;2)检测摇杆Y方向的位置:3)处理摇杆X方向的位置;4)处理摇杆Y方向的位置;5)获得左电机的脉宽和方向;6)获得右电机的脉宽和方向。
如果把摇杆的信号看作是二维输出信号,分别在二维坐标系中用X轴和Y轴表示。可以将X轴信号看作是代步车的转向速度给定信号,而Y轴信号则可以看作是代步车的前向或后向速度给定信号。如果用户想要转向或前进,则可将代步车的运动方向看作是X和Y的矢量合成。当代步车前进或后退时,左右轮同时向前或向后转动。当代步车向左转时,右轮正向转动,左轮反向转动或保持不动;相反,当代步车向右转时,左轮正向转动,右轮反向转动或保持不动。当两轮中一轮向前转动而另一轮向后转动,电动代步车做原地360°回转。
摇杆模块工作时,通过A/D转换器不断获取摇杆XY两个方向的坐标值,然后对这些坐标值进行处理,计算控制左右电机的PWM脉宽值。摇杆位置和左右电机脉宽的关系如图6所示,在实际的检测中,由于摇杆几何尺寸的限制,XY坐标值不可能同时为最大值。出于安全因素的考虑,为防止出现死区,当XY坐标值都大于某一值时,左右电机的脉宽都输出最大值。

3.4 电机控制模块
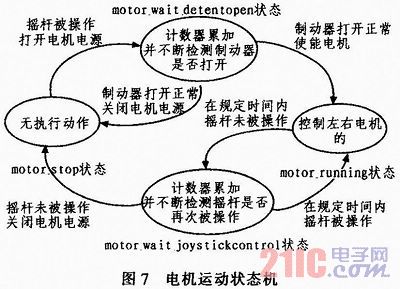
电机控制模块是电动代步车的核心模块,由于电机的运动状态较多,所以该部分也采用了有限状态机的编程方法,实践表明通过合理地抽象电机运动状态,可以使编程达到事半功倍的效果。电机控制的状态流程图如图7所示。
电机控制模块有以下主要功能:1)左电机的速度和方向控制功能:2)右电机的速度和方向控制功能;3)左电机加减速功能;4)右电机加减速功能;5)左电机电流检测功能;6)右电机电流检测功能。
合理的加减速控制可以大大增强电动代步车的舒适性。从摇杆检测模块获得的电机脉宽参数并不会直接作用在电机上,而是有一个中间的变量,这个中间变量会和当前的脉宽进行比较,当和当前脉宽相差不大时,当前的脉宽值和期望值相同;若这两个值相差较大时,这个中间变量会变大或者变小以减小和期待脉宽的差距。由于这些函数都是以每秒100次的速度快速运行,所以用户感觉电机的启动和停止都非常平稳。
4 结论
未来的电动代步车控制器将会朝着多功能化和个性化方向发展,操作舒适性和使用安全性依然是控制器设计的主旋律。工程师在安全性和舒适性方面不断地精益求精,同时也更重视控制参数的可调整性,例如可以调整摇杆的灵活性,以适应不同的室内室外环境。提高电动代步车的安全性能,降低生产成本,提高用户的自主操控能力,对取代传统轮椅车具有重要意义。本文介绍的电动代步车控制器,能够保证产品的使用性能,也降低了成本,已在实际产品中得到成功应用。该控制器功能还将在系统安全性,摇杆操控性能以及智能化程度等方面进一步改进和完善,为老年人和残疾人提供更好的产品。