
摘要: 介绍了TMS320LF2407 DSP在无刷直流电机控制系统中的应用研究,采用了模糊控制策略,设计了上位监控系统,给出了数字化、智能化的实现方案,实践结果证明了系统的平稳性和快速性满足要求。
1 引言
永磁无刷直流电机具有交流电机的结构简单、运行可靠、维护方便等特点,又具有直流电机调速性能好、运行效率高、无机械换向等优点,使它在机器人、数控机床、医疗器械、仪器仪表
仪器仪表
广义的说仪器仪表也可具有自动控制、报警、信号传递和数据处理等功能,如气动调节仪、电动调节仪表,以及集散型仪表控制系统等也皆属器仪表。仪器仪表能改善、扩展或补充人的官能。如显微镜、望远镜、声级计、酸度计、高温计等,可以扩展人的视、听、尝、摸外部事物的官能;有些仪器仪表,如磁强计、射线计数计等,可感受和测量到人所不能感受到的物理量;还有些仪器仪表可以超过人的能力去记录、计算和计数,如高速照相机、计算机等。 [全文]
等各领域得到了广泛的应用。尤其是采用了DSP数字信号处理器、电子换向器、光电编码器等,使得无刷直流电机的数字化、智能化控制系统的实现成为可能,也是当今研究与应用的热点。但由于无刷直流电机本身存在非线性、数学模型难以建立等问题,单纯用传统的PID难以获得较好的速度控制效果;加上以往用单片机
单片机
单片机是单片微型计算机(Single-Chip Microcomputer)的简称,是一种将中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)采用超大规模集成电路技术集成到一块硅片上构成的微型计算机系统。 [全文]
实现,线路复杂、速度慢,难以实现数字化、智能化控制。
本设计是在我所研制的DSP数字控制实践开发系统的基础上,以TMS320LF2407 DSP控制器为核心;以无刷直流电机为被控对象;以模糊PI为智能控制策略;以霍尔电流传感器
传感器
凡是利用一定的物性(物理、化学、生物)法则、定理、定律、效应等把物理量或化学量转变成便于利用的电信号的器件。传感器是测量系统中的一种前置部件,它将输入变量转换成可供测量的信号”。按照Gopel等的说法是:“传感器是包括承载体和电路连接的敏感元件”,而“传感器系统则是组合有某种信息处理(模拟或数字)能力的系统”。传感器是传感系统的一个组成部分,它是被测量信号输入的第一道关口。 [全文]
及光电编码器为检测手段,利用DSP速度快、运算能力强、资源丰富的优势,对无刷直流电机的控制与应用进行了研究。
2 系统结构设计
系统由“PC上位机、TMS320LF2407 DSP控制器、功率驱动模块、无刷直流电机、检测单元、通讯接口”等组成,如图1所示。

2.1 DSP控制器
TMS320LF2407是一种具有高速的运算能力与面向电机高效控制的数字信号处理器,集成了针对电机控制所需要的CPU、片内RAM、ROM/FLASH、SCI、事件管理器等功能模块资源。CPU具有独立的数据总线和地址总线,高速的运算能力,可完成复杂的控制算法与先进的控制策略;SCI串行通讯接口与PC上位机进行实时通讯,完成程序设计、数据采集及上位监控等功能;事件管理器的通用定时器用于产生电流和速度控制周期;16位脉宽调制PWM通道产生的信号供给驱动模块IGBT,通过调整PWM的占空比,进行电压自动调节,实现对无刷直流电机的转速和电流的控制;10位A/D转换接口用于测量电机的定子电流;正交编码器接口QEP用于接收光电编码器的反馈信号并计算转速;5个外部实时中断用于电机驱动保护和复位;3个捕捉单元可对电机转子位置进行检测等,这些资源为实现无刷直流电机数字化、智能化的研究与应用提供了极大方便,也是目前具有竞争力的数字电机控制器。
2.2 无刷直流电机
采用1500转/分,1.78A,27V电压供电的无刷直流电机,定子为三相对称绕组,转子是永磁体结构,采用星形接法两相通电三相6状态运行方式。当定子绕组两相通上方波电流产生的磁场与转子永磁磁场垂直时,则产生最大的电磁转矩驱动转子旋转。随着转子的旋转定子电流需要不断换相,才能保证两个磁场下的电流方向不变,因此通过控制三相定子电流的通电顺序和大小,就可实现电机转速的控制。
2.3 功率驱动模块
功率驱动采用东芝公司的IPM模块,包括驱动电路、逆变电路及保护电路,逆变电路采用6单元IGBT三相星形全桥连接驱动方式。利用高速光耦
光耦
光耦全称是光耦合器,英文名字是:optical coupler,英文缩写为OC,亦称光电隔离器,简称光耦。它对输入、输出电信号有良好的隔离作用,所以,它在各种电路中得到广泛的应用。目前它已成为种类最多、用途最广的光电器件之一。 [全文]
TLP550实现隔离驱动,使用事件管理器EVA的PWM脉冲信号控制逆变器
逆变器
逆变器(inverter)是把直流电能(电池、蓄电瓶)转变成交流电(一般为220v50HZ正弦或方波)。应急电源,一般是把直流电瓶逆变成220V交流的。通俗的讲,逆变器是一种将直流电(DC)转化为交流电(AC)的装置。它由逆变桥、控制逻辑和滤波电路组成.广泛适用于空调、家庭影院、电动砂轮、电动工具、缝纫机、DVD、VCD、电脑、电视、洗衣机、抽油烟机、冰箱,录像机、按摩器、风扇、照明等 。 [全文]
的工作状态,再根据转子磁极的位置进行电机定子电流实时换相的逻辑控制;通过调节PWM脉冲的占空比可改变电机绕组的平均电压,从而控制定子电流的大小;使用可编程PWM死区控制可以防止逆变桥短路的现象。
2.4 定子电流检测
电流检测采用2个霍尔电流传感器CSNE151,分别检测A、B两相的相电流(因为任一时刻只有两相通电),再整合成一直流电流,经滤波后送DSP的A/D转换模块,则系统可采用一个电流调节器对电机的电流进行闭环控制。
2.5 位置检测与速度计算
转子位置是通过3个互差120°脉冲宽度为180°的霍尔位置传感器
位置传感器
位置传感器可分为两种,直线位移传感器和角位移传感器。其中直线位移传感器常用的有直线位移定位器等,具有工作原理简单、测量精度高、可靠性强的特点;角位移传感器则可选旋转式电位器,具有可靠性高、成本低的优点。角位移器还可使用光电编码器,,有增量式与绝对式两种形式。其中增量式码盘在机器人控制系统中得到了广泛的应用。 [全文]
,来实时检测转子磁极位置的6个循环变化状态,每个60°电角度对应电机的某一对磁极下的一个位置,转子位置状态每变化一次,绕组导通就改变一次。A、B两路脉冲信号送入DSP的正交编码脉冲接口单元QEP的QEP1和QEP2引脚,经译码逻辑单元产生时钟信号CLK和转向信号DIR,将CLK作为定时器1的时钟输入,由T1对CLK进行脉冲计数,可以产生60°电角度脉冲信号的中断。即根据霍尔位置传感器的状态信息,结合换相逻辑,DSP控制逆变器的导通或截止,从而控制电机定子绕组电流的换相。
速度检测采用2000个脉冲/每转的E6B2光电编码器,直接将电机角度的模拟信号转换成脉冲信号,分别用定时器设置控制周期和对脉冲进行计数,实现鉴相、倍频、转速测量与闭环控制功能。系统各检测状态与换相逻辑如表1所示。
3 控制系统设计
3.1 系统方框图
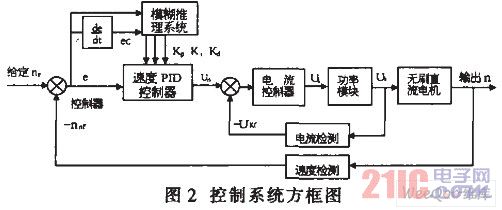
控制系统采用速度、电流双闭环控制,速度环的作用是增强系统对负载变化的抗干扰能力,抑制转速波动,为提高系统的动态和静态性能,速度环控制器采用模糊自整定PID控制算法。电流环使电流紧紧跟随速度控制器的输出,对系统的扰动起抗干扰作用,为此电流环控制器采用PID控制算法,DSP通过速度环和电流环实时调节PWM的占空比来实现转速的控制。模糊自整定PID与PID控制算法的有效结合,使系统具有较强的适应性,确保速度主被控量的控制质量。
控制系统方块图如图2所示,其中nr为系统速度给定量;Un为速度控制器输出的控制量;Ui为电流控制器输出的控制量;UKf为电流环反馈量;Uk为功率模块
功率模块
功率模块是功率电子电力器件按一定的功能组合再灌封成一个模块。 [全文]
输出的控制量;nnf为速度环反馈量;n为速度环的被控量。
3.2 模糊子集及隶属函数
速度环控制器的转速给定nR和转速反馈值nnf的误差e(E)和误差变化率ec(EC)作为模糊控制器的输入,以Kp、Ki、Kd作为输出,找出PID与误差E和误差变化率EC的模糊关系,运行中不断检测E和EC,再根据模糊控制控制原理对PID进行在线调整,以满足不同的E和EC下被控过程对△Kp、△Ki、△Kd的要求。
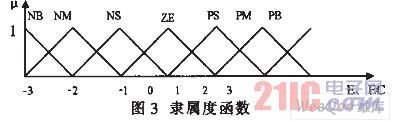
模糊子集为E=EC=△Kp=△Ki=△Kd=﹛NB,NM,NS,ZE,PS,PM,PB﹜=﹛负大,负中,负小,零,正小,正中,正大﹜;输入变量论域为E=EC=﹛-3,-2,-1,0,1,2,3﹜;输出变量论域为△Kp=﹛-0.3,0.3﹜,△Ki=﹛-0.08,0.08﹜,△Kd=﹛-3,3﹜。隶属度函数采用灵敏性较强的三角函数,E、EC隶属度函数如图3所示。
3.3 模糊控制规则设计
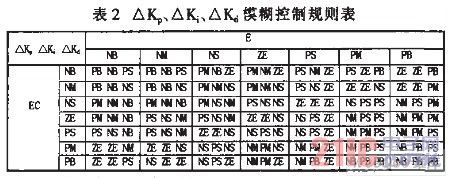
速度环模糊控制规则采用if(条件) and then(结果)的形式表达,根据经验并通过反复调试得到下述49条控制规则,模糊控制规则如表2所示。
(1) if E is NB and EC is NB then △Kp is PB,△Ki is NB,△Kd is PS;
(2) if E is NB and EC is NM then △Kp is PB,△Ki is NB,△Kd is NS;
┋
(49) if E is PB and EC is PB then △Kp is NB,△Ki is PB,△Kd is PB。
3.4 模糊推理与模糊判决
根据模糊控制规则,求出△KP、△Ki、△Kd的隶属度P△K、i△K、d△K;采用加权平均法计算出输出量△Kp、△Ki、△Kd的确定值;再将Kp、Ki、Kd的代入PID控制算法中,计算出速度环输出的控制量Un,完成了PID参数的在线自整定过程。
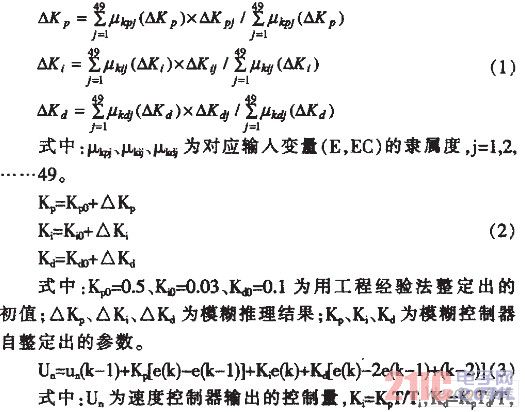
T=10ms为采样周期。
3.5 控制程序设计
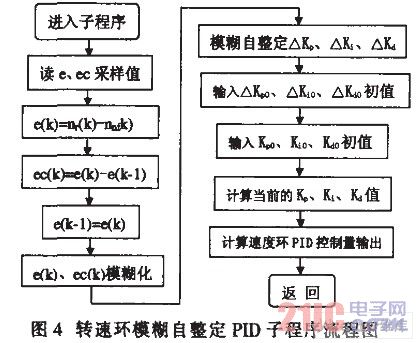
在TMS320LF2407 DSP控制器上,采用C语言和模块化设计方法,设计出速度控制器和电流控制器的应用程序,包括主程序、模糊自整定PID子程序、PID程序、中断子程序等,完成初始化、参数给定、数据采集、运算与转换、控制算法、控制量输出、PWM与ADC中断、逻辑换相、故障检测等,实现了对直流无刷电机的实时控制。模糊自整定PID子程序如图4所示。
4 通讯与监控系统设计
采用现场总线Modbus和上位监控技术,设计了通讯与监控系统的硬件电路和软件程序。用C语言和中断程序法设计了下位机通讯程序,包括端口初始化、确定通讯波特率、校验位、奇偶位、地址等。用VB语言的通讯控件MSComm对通讯端口进行初始化和通讯格式确定,并应用面向对象的程序方法设计了上位监控系统,包括系统命令、趋势组态、功能组态、状态检测等,如按下系统命令中的“参数设置”功能按钮,可进行速度给定nr,Kp0、Ki0、Kd0初值等值的设定;按下“显示设置”可观察Kp、Ki、Kd、n等实时参数。实现了上、下位机通过现场总线Modbus进行信息交换,人-机界面友好,操作方便灵活。
5 系统调试结果
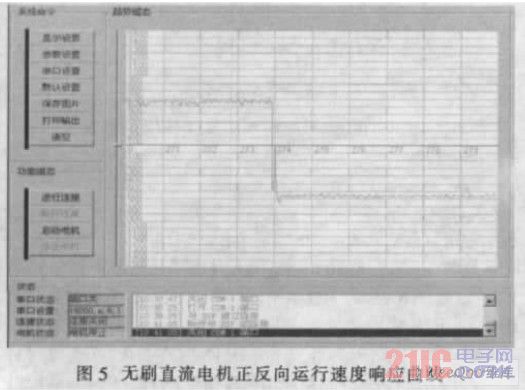
系统速度环给定为650转/分,启动并运行系统,由上位机监控的可视化运行曲线可知,速度响应快,无超调,调节时间短,能快速实现正、反向运行,获得了较好的的起动性能与运行性能,满足了无刷直流电机系统对速度调节的平稳性和快速性的要求,转速特性如图5所示。
6 结束语
本文的创新点是融合了“现场总线,智能控制,数字检测,上位监控”等多种先进技术,充分利用了DSP速度快、运算能力强、资源丰富的优势;发挥了模糊自整定PID和PID控制算法的优势,使系统具有较快的响应速度和抗参数变化的鲁棒性;设计的通讯与上位监控系统,实现了系统的实时监控与远程控制,方便灵活,实际调试结果证明了该设计的有效性。我所研制的DSP实践开发系统已在高校和企业培训中心得到了应用,并具有较好的推广前景