
1 引言
层析成像CT(Computed Tomography)是指通过物体外部检测到的数据来重建物体内部(横截面)信息的技术,又称为计算机辅助断层成像技术。它是把不可分割的对象假想切成一系列薄片,分别给出每一薄片上的物体图像,然后再把该系列图像叠加起来,从而得到物体内部图像。它是一种由数据到图像的重建技术,通过伪彩色图像反映被测材料或制件内部质量,定性、定量分析其缺陷,从而提高检测的可靠性。层析成像技术创新了探测物质内部结构。该技术可应用于多种能量波和粒子束,如X射线、电子质子、超声波等。
CT应用超声波能量称为超声层析成像U-CT(Ultrasonic-Computed Tomography)。早期研究假设超声波在物体内部以直线传播,利用发射器到接收器之间的时间延迟或振幅衰减,重建物体内部的声速、吸收特性等参数。但实际超声波具有明显的衍射特征,在界面上具有显著的折射、衍射,因而传播路径复杂,这使得U-CT的理论研究和X射线层析成像(X-CT)有所不同。获得更清晰的图像检测效果则成为首要问题,因此,这里提出一种超声层析成像检测系统的设计。
2 超声CT阵列检测方法
针对超声层析成像检测中数据提取较困难的特点,为提高精度,在深入研究超声场的特点,结合数字化技术,这里并未采用目前主流的依次排列的一线式布置方法,而是采用环绕式阵列检测方法,如图1所示。

根据试件形状,将探头阵列按照一定次序捆绑在试件周围,其原则是应均匀布置,这样有利于数据处理过程中网格的划分和射线追踪。在脉冲信号的控制下,当其中一个作为发射探头时,其余探头作为接收探头,各个探头依次发射超声波信号。探头的个数由所测试件的大小、测量精度、网格划分情况等因素决定。采取该布置方法的优点:可实现任意形状试件的检测,具有良好的通用性;获得较精确的检测信息。
3 基于DSP的超声CT成像系统的总体设计
该系统由超声发射接收电路、信号采集、控制电路、信号处理与显示部分组成,如图2所示。整个超声CT成像检测系统由数据(声时)采集、数据处理,以及图像处理显示3部分构成。所需设备和元件包括:若干超声发射探头和接收探头;由单片机组成的脉冲控制电路;2个读写存储器RAM;2个由DSP组成的数字信号处理电路(分别内置射线追踪程序和反演迭代程序),及DSP驱动的显示阵列LCD。
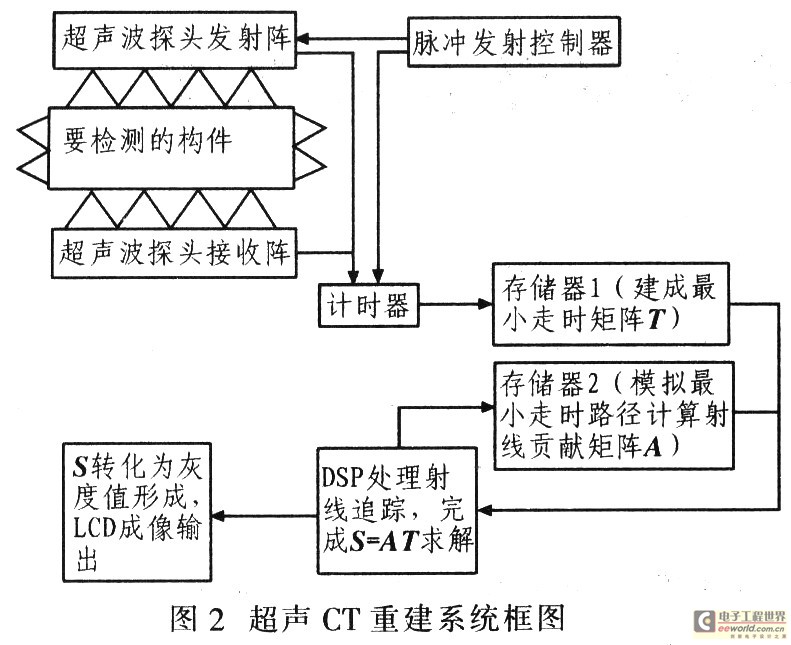
超声发射装置是由脉冲控制电路以一定周期发射超声波,接收探头接收信号后,通过高精度计时器得到最小走时矩阵,并存储于存储器1,从而完成数据采集;由存储器1中的最小走时矩阵初步建立(假定超声直线传播)介质内部的慢度矩阵,南慢度矩阵按照射线追踪得到走时路径,存储于存储器2,按照存储器1,2中的信息,经DSP处理,完成方程求解,得到最终精确的慢度矩阵,完成该系统的核心功能一数据处理;重建的慢度矩阵转化为灰度值,由DSP控制LCD显示阵列。最后由工程技术人员对照标准的无缺陷的介质,分析试件,确定有无缺陷,缺陷的位置,大小以及严重情况。
4 图像重建算法
实现超声层析成像有正演和反演两个基本过程。正演是反演的基础,其模型选取与求解精度直接影响反演变精度;而反演过程实际是对问题的最优化过程。反演方法一般分为变换重建法和级数展开法两大类。由于级数展开法通过离散重建区域,降低原有问题的非线性,适合投影数据不够精确、不能完全且以射线为曲线的层析成像。根据反演的理论基础,层析成像分为以射线理论为基础的射线层析和以波动理论为基础的波动层析。目前CT技术从直射层析成像向弯曲射线层析成像发展。反演方法由最小二乘法发展到各种约束条件下的加权阻尼最小二乘法以及统计法,如最大熵法。观测参数由单一走时数据向多参数数据发展。反演方法则从线性(代数重建法、联合跌代重建法等方法)向非线性(梯队法、模糊神经网络算法和遗传算法等方法)方向发展。射线追踪是确定波从激发点传至接收点的射线路径及其走时的主要技术。因为层析面上各点的波速不相等,波传播的路径是一个与材料不均匀性相关的曲线,其真实路径未知,所以可采用射线追踪理论求取其真实路径。而射线追踪算法分为向前处理与向后处理两部分。
(1)向前处理先计算离散网格模型上所有边界点的最小走时,然后计算发射点单元所在列各单元边界上所有离散点的最小走时。并记录对应的次级源,接着对发射点单元所在行各单元边界上所有点的计算与第二步相同。在求出每网格内局部走时的基础上,对发射源发出的射线在整个模型上的走时相加便得到全局最小走时。
(2)向后处理根据向前处理中得到的各单元边界上所有计算点的最小走时及相应次级源,追踪所有发射点到接收点间具有最小走时的射线路径。首先求出接收点所在单元边界上走时最小的离散点,以走时最小的离散点为新的接收点,重复上一步骤向前推,直到发射点所在单元为止。将发射点与最后的射线交点相连。即完成全部向后处理。

5 层析结果
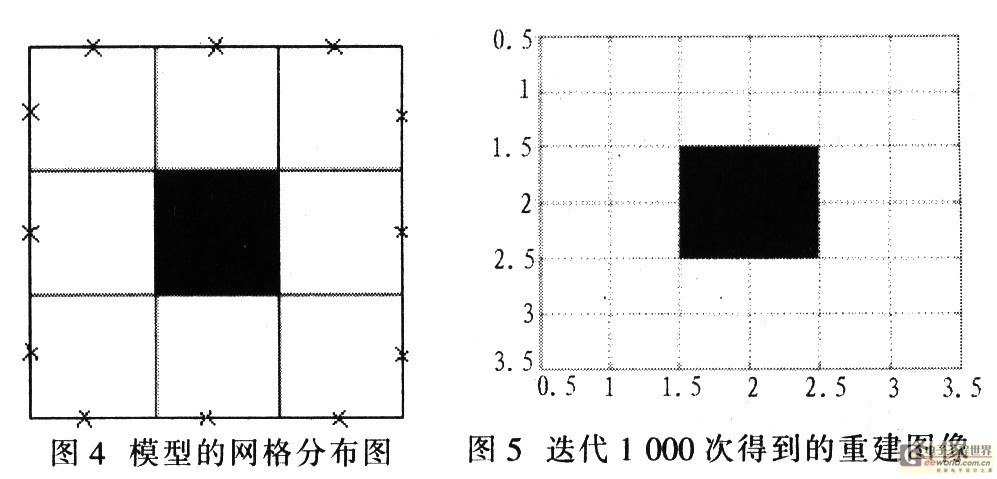
图4为假设模型的网格分布图,其背景区域的速度为v0=4.000 m/s,异常区(即黑色区域)速度为v1=3 000 m/s。探头布置采用环绕方式,利用线性插值射线追踪算法和联合迭代重建算法得到速度层析图像,结果如图5所示,从图5中可清晰发现低速区。因此,解决了图像检测中图像清晰度不高的困扰。此设计方案可运用到各种需要利用超声波图像检测的领域。
6 结论
本文所采用的阵列检测方法,在射线追踪算法和SIRT重建方法的基础上,所提取的走时数和超声波数目大大增加,这样在相同的迭代次数条件下,得到结果更精确,重建图像结果更清晰准确。