
语音控制系统硬件结构图" height:="" src="http://files.chinaaet.com/images/20110905/7719471a-83ce-4f0e-82e6-6dc9e488e318.jpg" />
图1 系统硬件结构图
方案论证
主控模块和语音处理模块的选择
较MCS-51系列单片机而言, SPCE061A单片机内部集成有32KB的ROM、2KB的SRAM,更能满足软件对空间的要求,且不需要扩展相关存储器。另外,该类单片机完全支持C语言,软件编写比较方便,语音处理模块采用凌阳的语音压缩算法,也用软件来实现。该单片机内部集成有A/D、D/A转换功能,方便实现语音录放功能。
电机模块的选择
电机模块选择直流电机。与步进电机相比较而言,直流电机具有转速快、控制方便等特点,更能够满足小车较高速行驶情况的要求,如图2所示。
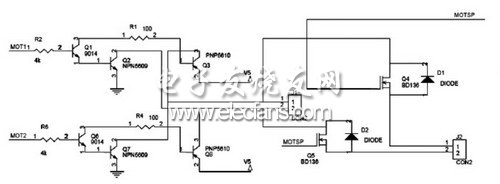
图2 电机控制模块原理图
测路程方案的选择
本文利用红外对管来实现对小车的路程测量。在小车的车轮转轴上安装一个不透光转盘,在转盘边缘均匀地打N个孔,当红外发射管发射的红外光经小孔照射到接收管时,接收管的反向端电平将发生变化,单片机通过检测这种电平的变化便可以自行计算出小车的运行路程。红外对管还具有体积较小、安装较霍尔传感器更方便、成本低等特点。
系统硬件结构
语音控制小车的系统硬件结构主要由两部分组成:一部分是SPCE061A精简开发板,另外一部分是电机控制板。SPCE061A精简开发板为系统主控模块,电机控制板则驱动小车的前后两个电机按系统的要求工作。
小车控制板主要包括接口模块、电机控制模块、预留传感器接口以及电源模块等几部分。其中,电源模块采用集成稳压芯片 L7805,在输出端(控制板的JP11)并接了一个470μF的去耦电容和一个 0.1μF的滤波电容,增强了系统电压的稳定性和抗干扰性能。
电机控制模块是整个控制板的核心部分,其根据61板的具体输出信号启动或停止相应的电机,并调整电机的正反转方向,实现小车的前进、倒退等功能。后电机的控制电路包括方向控制和速度控制两个单元,前电机的控制电路则只有方向控制单元。控制单元负责小车电机的正转、反转和停止三态控制。速度控制单元是扩展单元,以适应不同的场合需求。
红外对管测小车运行路程部分的原理图如图3所示。
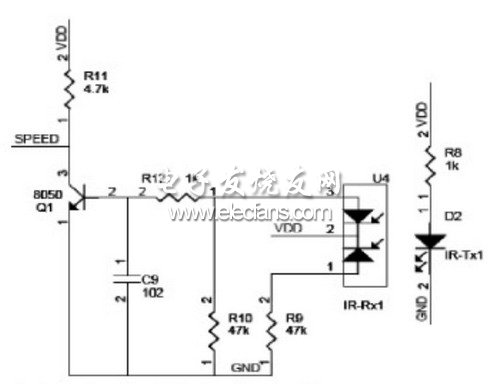
图3 红外对管电路原理图
红外发光管D2和接收管U4安装在同一水平线上,发射管D2一直处于发射工作状态。当D2和U4间没有被挡住,即D2发射的红外线照射在U4上时,U4的2脚和3脚导通,同时2脚和1脚也导通,此时晶体管Q1的基极电压为Ub=VDD×R12/(R12R10),Q1导通,SPEED端近似于接地,呈低电平状态。当D2和U4间被挡住时,即D2发射的红外线不能照射在U4上时,U4的2脚和3脚截止,同时2脚和1脚也截止,此时Q1的基极经电阻R12和R10接地,即基极电压为0V,此时Q1截止,SPEED端经电阻R11接到VDD,呈高电平状态。单片机通过检测这种高低电平的变化来实现小车的路程测量。
软件部分
主程序流程
小车的主程序流程图如图4所示,主要分为四部分:初始化部分、训练部分、识别部分和重训操作。
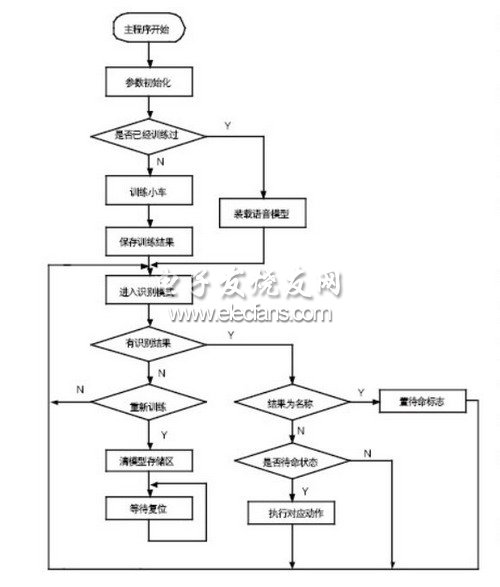
图4 主程序流程图
初始化部分的初始化操作会将SPCE061A单片机上的IOB13~IOB10设置为输出端,用以控制电机。将其IOA的低8位IOA0~IOA7设置为下拉的输入端,用来连接按键。
训练部分完成的工作是建立语音模型。程序一开始会判断小车是否被训练过,如果没有训练过,系统会要求对其进行训练,并且会在训练成功之后将训练的模型存储到Flash中;如果已经训练过则会把存储在Flash中的模型调出,装载到辨识器中。
在识别环节当中,如果辨识结果是名字,直接置待命标志,然后等待动作命令。只有检测到待命标志,小车才会根据相应的辨识结果执行动作。如果没有待命标志,即使识别到动作命令也不会执行动作。小车在执行完对应的命令之后清除待命标志,结束待命状态。
考虑到有重新训练的需求,这里设置了重新训练的按键。程序运行时循环扫描该按键,什么时间检测到此键按下,则将擦除语音模型存储区首单元(0xe000)所在的页,等待复位到来。复位后,程序重新从头开始执行,当检测到语音模型存储区首地址为0xffff(擦除后的值)时,系统会要求重新对其进行训练。
FIQ中断服务程序
FIQ中断服务程序用来调用语音辨识子程序,并对a2000格式的语音进行解码播放。
调试及性能分析
系统的调试以程序为主。硬件调试时,首先检查电路的焊接是否正确,然后用万用表测试或通电检测。软件调试则需要分别进行主程序、FIQ中断服务程序、显示子程序等的编程及调试。本程序采用单片机汇编语言编写,用KEIL uVision2编译器编程调试。软件调试直到语音能够控制小车的行驶状态,并显示出小车的行驶距离等功能为止。
结语
本文设计的语音控制系统主要采用16位单片机SPCE061A来实现。软件编程则是采用C语言和汇编语言的混合编程来实现的,集两种语言的优点于一体,实现对硬件的实时控制。通过实验验证,该语音控制系统主要可实现以下功能:
(1)可以通过语音命令来控制小车的行驶状态,实现前进、后退、左转、右转等功能;
(2)显示小车的运行时间以及运行路程;
(3)可以扩展控制板的调速环节,利用系统的PWM资源,实现小车的PWM调速;
(4)预留多路开关型传感器接口,可以自行安装各类传感器,配合程序实现小车的循迹、避障等功能。