
通过先进的载体设备和技术手段,检测、诊断、维修电子喷射的现代化汽车。本文的汽车发动机检测装置就是一款具突破性的装置。
汽车发动机检测装置
本文以LPC2134微处理器为核心,其他还包括高压线圈感应电路,低压线圈感应电路、电源电路、LCD点阵显示电路以及键盘电路等。硬件框图如图1所示。

图1 汽车速度检测系统硬件框图
这里,LPC2134微控制器基于一个支持实时仿真和嵌入式跟踪的32位ARM7TDMI-S CPU,并带有128kB嵌入的高速Flash存储器。?较小的封装和很低的功耗,以及8位ADC和10位DAC,使其特别适用于工业控制应用以及各种测量系统。
本系统主要检测高压低压线圈的波形信号,并将其显示在LCD显示器上,还可通过高压信号的两次脉冲间隔计算发动机的转速。
本装置直接连接220V交流市电就可以工作。
汽车发动机检测系统硬件环境
电源电路
本装置电源电路如图2、图3所示。
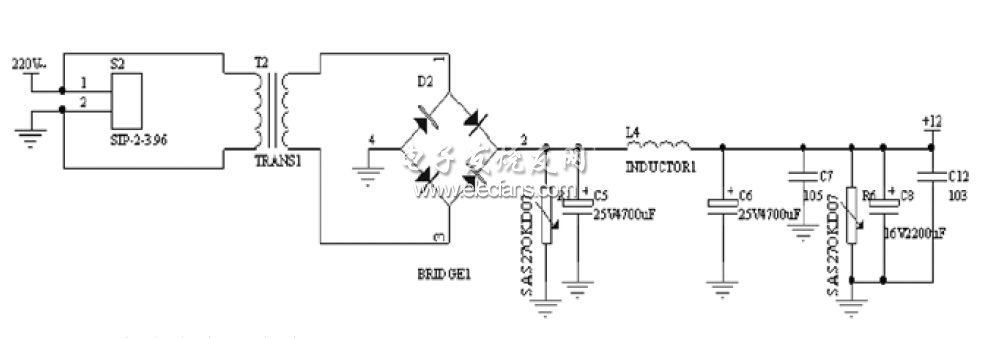
图2 220V交流电变压直流12V

图3 直流12V变压直流3.3V
图2中,从接口S2接入的220V左右的交流电压,经变压器T2变压,经全波整流电桥D2整流后,得到为0~12V左右的波动直流。这一波动的直流经C5、C6、L4组成的∏型滤波后,得到一较平稳的直流,再通过C7、C8、C12滤掉杂波,再经图3中HT7533稳压为+3.3V,经C13、C18、C19、C20再次滤波后,得到稳定的+3.3V直流电流,为系统微处理器和显示电路供电。
点阵模块OCM12864-5
OCM12864液晶显示模块是128×64点阵型液晶显示模块,可显示各种字符及图形,可与CPU直接接口,具有8位标准数据总线、6条控制线及电源线。这里采用KS0108控制IC。
线圈感应及显示硬件电路
汽车发动机检测原理主要是通过感应线圈感应高压与低压线圈的信号,并将感应信号通过开关管输入到LPC2134微处理器的GPIO端口。通过微处理器的定时器测量脉冲信号的周期,再将信号显示在LCD点阵显示器上。由于发动机旋转两周就会出现连次高压线圈信号,因此通过测量两次高压脉冲的时间间隔,就可以计算出发动机的转速。转速数值经软件转换成显示码由显示电路处理后显示出来。 LPC2134与OCM12864接口电路如图4所示。

图4 LPC2134与OCM12864接口电路图
软件设计中,主程序对键盘子程序进行扫描,如有键被按下,LPC2134微处理器相应的端口电压就会被拉低,单片机的功能就对端口进行定位,判断是哪个端口被拉低,并计算建值,从而转向执行不同功能的子程序,并刷新显示器的显示内容。键盘电路
硬件电路中,按键一端接上拉4.7kΩ电阻接ARM输入,另一端接地,如图5所示。

图5 键盘电路
利用键盘扫描法,首先判断有无键按下。为此,设置微处理器端口由高电平变成低电平,表明有键按下;若微处理器端口为高电平,则表明无键按下。图中,KEY1按下显示高压线圈波形信号,KEY2按下显示低压线圈波形信号,KEY3按下显示发动机速度,KEY4按下则打开背光。
汽车发动机检测装置软件程序
本系统软件主要的任务是:主程序扫描键盘,当有键按下,判断键值转向,执行不同的功能程序模块,同时进行相应测量,并通过LCD点阵显示器显示相应的测量信息。
主程序由脉冲检测子程序、键盘子程序、定时中断子程序、速度计算子程序和显示子程序等组成。如图6所示。
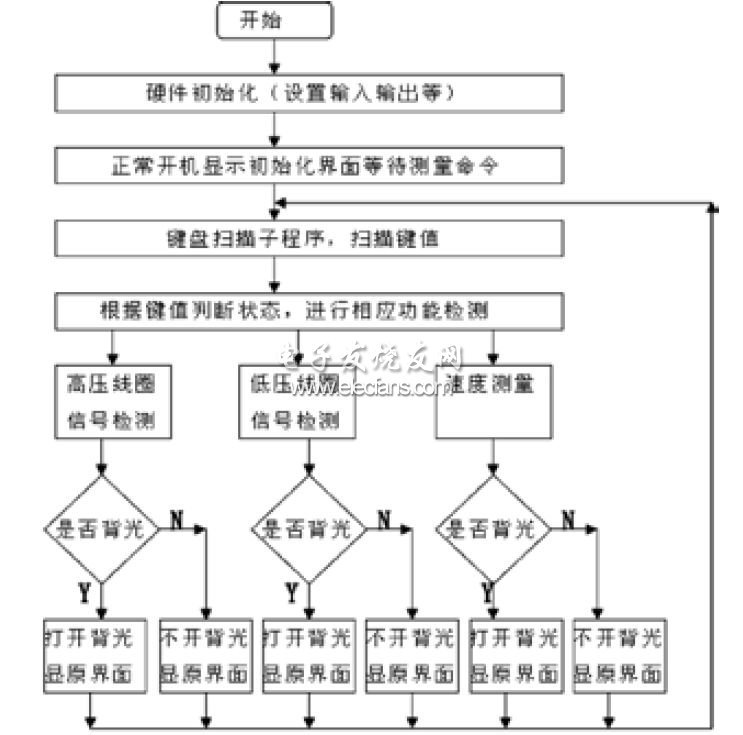
图6 程序方框图速度脉冲计算的子程序及解释如下:
uint32 speed(void)
{
uint32 Time;
uint32 SpeedValue;
PINSEL0 = 0x00050005;
PINSEL1 = 0x14000000;
IO0DIR = 0x02000000;
IO1DIR = 0x003f0000;
// 硬件输入输出接口初始化
T0TC = 0;
//定时器设置为0
T0PR = 0;
//时钟不分频
while((IOPIN&0x00000004) != 0); //等待p0.4低电平脉冲信号
T0TCR = 0x01;
//启动定时器0
while((IOPIN&0x00000004) == 0)
while((IOPIN&0x00000004) != 0);
//等待p0.4下一个低电平脉冲信号
T0TCR = 0x00;
Time = T0TC;
Time = Time/Fpclk;
//记录脉冲宽度
SpeedValue = 1/Time*60;
//计算速度每分钟多少转
return SpeedValue;
}
显示部分子程序及解释如下:
/*-显示器初始化-*/
void init_lcd (void)
{
IO1CLR = rst;//rst=0;
delay(50);
IO1SET = rst;//rst=1;
IO1SET = cs1;//cs1=1;
IO1SET = cs2;//cs2=1;
wr_lcd (comm,disp_off); //#define comm 0 关显示
//#define disp_off 0x3e
wr_lcd (comm,disp_on);
//#define disp_on 0x3f 开显示
}
/*-写数据或命令到LCD-*/
void wr_lcd (uint8dat_comm, uint8 content)
{
chk_busy ();
if(dat_comm){ IO1SET = di; }
else{ IO1CLR = di; } //di=dat_comm;
IO1CLR = rw;//rw=0;
IO0DIR = IO0DIR | IO16_23;
// 设置P0.0-P0.7为GPIO输出模式
data_ora=( ( data_ora & !(IO16_23) ) | content<<16 );
IO1SET = e;//e=1;
IO1CLR = e;//e=0;
IO0DIR=IO0DIR & !(IO16_23);// 设置P0.16-P0.23为GPIO输入模式
}
/*-读LCD数据-*/
uint8 rd_lcd (void)
{
uint8 rddata;
chk_busy ();
IO1SET = di;//di=1;
IO1SET = rw;//rw=1;
IO1SET = e;//e=1;
rddata= data_ora>>16;
IO1CLR = e;//e=0;
return rddata;
}
/*-写点阵-*/
void lat_disp (uint8 data1,uint8 data2)
{
uint8 i,j;
IO1SET = cs1;//cs1=1; //两屏同时写数据
IO1SET = cs2;
//cs2=1;
wr_lcd (comm,disp_on);
for(j=0;j<8;j++) //共8页
{
wr_lcd (comm,disp_x+j);
wr_lcd (comm,disp_z);
wr_lcd (comm,disp_y);
for(i=0;i<32;i++)
{
wr_lcd (dat,data1);
wr_lcd (dat,data2); //每页64个数
}
}
}
/*---指定位置(x,y)显示row_xl行(每行row_yl个)汉字(大小8xl*yl)---*/
void chn_disp (uint8 x,uint8 y,uint8 xl,uint8 yl,uint8 row_xl,uint8 row_yl,const uint8 *chn)
{
uint8 i,j,k,l,a;
//row_xl:显示row_xl行
wr_lcd (comm,disp_on);
//每行row_yl个汉字
for(l=0;l
//xl:页大小,一页八个点
{
//yl: 列大小,一列一个点
for(k=0;k
//x,y:起始位置
{
for(j=0;j
{
wr_lcd (comm,disp_x+x+l *xl+j);
wr_lcd (comm,disp_z);
wr_lcd (comm,disp_y+y+k*yl);
a=l*xl*yl*row_yl+k*xl*yl+j*yl; //a:数组chn[]中第a个字符
for(i=0;i
wr_lcd (dat,chn[a+i]);
}
}
}
}
结语
本系统以目前广泛应用的LPC2134 ARM为控制处理核心,以感应高压线圈和低压线圈作为ARM的输入信号,用OCM12864的点阵作为仪器的显示,使该装置可以有效完成对汽车发动机的的精确测量。它可以将发动机动态运行的各种参数和故障检测诊断出来,然后通过维修、调整以达到修复发动机的目的。