
摘要:基于GPS辐射源的无源雷达,利用目标对非合作GPS信号的反射工作,具有很强的反侦察、抗隐身及生存能力。由于基于GPS的无源雷达系统,回波信号非常弱,故回波信号的干扰抑制及有效信号的获取是其信号处理非常重要的内容。时基于GPS辐射源的无源雷达回波信号中的直达干扰采用自适应滤波的方法进行抑制,对多径干扰提出采用功率倒谱分析法进行分离。在理论研究的基础上给出仿真结果,结果表明,所采用的方法能很好地达到干扰的抑制,为系统的实用提供了仿真依据。
近年来,反辐射及隐身技术等电子侦察干扰技术的进步,大大降低了单基地雷达的探测能力。且由于单基地自身发射能量,容易被电子侦察定位系统探测到,对其生存构成严重威胁。
基于GPS外辐射源的无源雷达系统不主动发射信号,利用空中已有的GPS卫星发射的非合作信号进行目标检测、估计、跟踪及定位。这是提高雷达反侦察、抗隐身、及生存能力的有效方法之一。由于其不需要建造和维护高功率发射机,系统成本很低,与高性能有源雷达有机结合可以形成高效、可靠的防空情报系统,因而对无源雷达系统的研究受到世界各国的高度重视。
本文主要研究基于GPS照射源的天地双(多)基地雷达系统信号回波信号的干扰抑制问题,通过计算机仿真验证,为系统的实用化提供了坚实的理论基础和仿真依据。
1 回波信号模型
基于GPS辐射源的无源雷达的几何关系如图1所示。
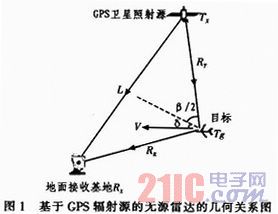
GPS卫星发射信号的理想模型可设为(1)式:

其中,CA(t)为C/A码,f1=1575.42MHz,A1为幅度。忽略时间延迟和初始相位,L1(t)就是GPS直达接收机的信号模型;经地面接收机混频至中频后表达式为(2)式:
![]()
其中,Amidf为载波幅度,混频到固定中频f0=1.25MHz。运动目标反射的信号经混频后表达式为(3)式:
![]()
其中,Atag为目标反射加权后回波幅度,τ为目标反射造成的回波延迟时间,fd为多普勒频移。在雷达接收端,收到的信号包括:1)未经任何目标反射的直达信号;2)运动/静止目标的反射信号;3)经多径反射到达的多径干扰信号;4)接收机周围环境引入的干扰。直达信号最强;多径信号和目标反射信号及环境因素均为随机信号,幅度较弱,需要从以上3种主要的干扰中获得有用回波信号,并从中提取信息,对目标的距离,速度等参数进行计算估计,从而实现探测、跟踪和定位,是无源雷达信号处理的主要任务。
2 直达干扰抑制
直达干扰的抑制可在1)空间域;2)时间域;3)频域中进行。本研究采用自适应抵消器来抑制直达干扰,为时间域抑制方法。此方法在实现上,只涉及自适应滤波器的设计,实现简单且效率很高。
2.1 自适应抵消器的原理
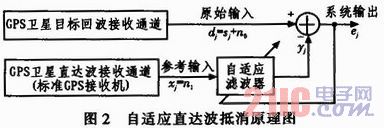
自适应直达波抵消系统是自适应滤波器的拓展形式。框图如图2所示。原理为:期望信号输入端为有用回波信号sj加直达干扰n0的原始输入端dj,sj与n0不相关;滤波器的参考输入端xj为已检测到的直达信号n1,n1与n0相关、与sj不相关。自适应滤波器的传输函数根据输出ej=sj+n0-yj自动调整,以将原始输入中的噪声干扰抵消掉,误差输出即目标回波信号。
2.2 自适应直达抵消算法
自适应直达波抵消时权矢量的自适应调节过程可采用最小均方(LMS)算法,即以期望信号与输出间误差的均方值![]() 最小为准则,在迭代过程中估计梯度矢量,并更新权系数以达到权矢量最优。权矢量表达式如式(4)所示。
最小为准则,在迭代过程中估计梯度矢量,并更新权系数以达到权矢量最优。权矢量表达式如式(4)所示。

递推最小二乘(RLS)算法是另一种自适应算法,以误差ej的最小二乘准则(即使![]() 最小)为最佳准则。设δ-1为初始化矩阵系数,λ为遗忘因子。
最小)为最佳准则。设δ-1为初始化矩阵系数,λ为遗忘因子。
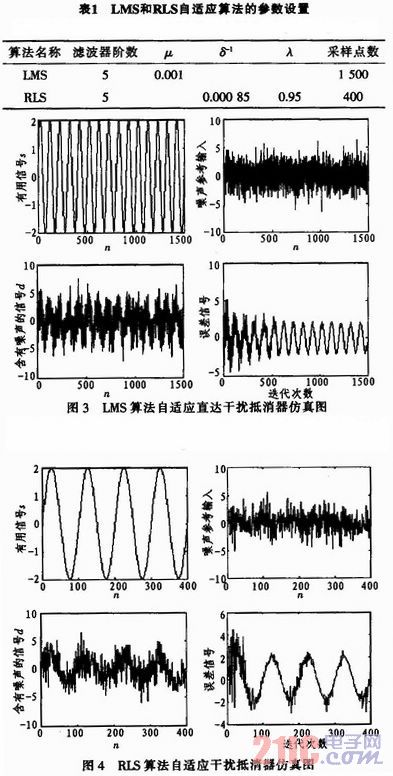
本研究中分别应用LMS算法和RLS算法进行自适应直达干扰抵消处理,并给出计算机仿真结果。算法的参数设置如表1所示。抵消滤波结果见图3、图4所示。
2.3 性能分析
LMS算法实现简单,但为保证算法收敛不得不将收敛因子μ取得很小,这导致了算法收敛较慢;RLS算法不对信号统计特性做假设,为确定性最佳优化问题,收敛更快,估计精度更高,为获得更好的直达干扰抑制性能,可采用RLS算法做自适应直达抵消滤波器的算法。
3 多径干扰抑制
多径干扰的抑制方法研究一直是雷达及通信领域的热点,功率倒谱常用于声音回响,图像处理及雷达时延估计等领域。本研究将功率倒谱的方法应用于对多径干扰的分解和估计,并提出去除多径干扰的方法。
根据多径传输的特点,总信号可表示为x(n)=s(n)*h(n),式中s(n)是直达信号;![]() ,wk是第k路多径信号幅度加权系数,τk是第k路多径信号时延。
,wk是第k路多径信号幅度加权系数,τk是第k路多径信号时延。
可采用功率倒谱分析方法,进行多径干扰的抑制,尽管倒谱分析方法计算和运算量大。但它仍是主要的抑制多径干扰的有效方法。功率谱对数值的傅利叶逆变换称为倒谱(cepstrum),其数学表达式为: 是离散时间信号x(n)的离散时间傅里叶变换。
是离散时间信号x(n)的离散时间傅里叶变换。
首先考虑只有一路多径信号的简单情况,此时h(n)=δ(n)+w1δ(n-τ1)。

所得功率倒谱中,前两项为直达信号倒谱,第三项延迟冲激峰代表多径信号的倒谱。第四、第五及更长延迟时间项与幂级数展开高次项对应,其加权系数随延迟时间的增加越来越小,相比直达信号倒谱可以忽略。上式还表明功率倒谱可将直达信号和多路径信号在功率倒谱域分解开来,从而可在功率倒谱域进行低通滤波处理,从而达到抑制多径信号的干扰的目的。
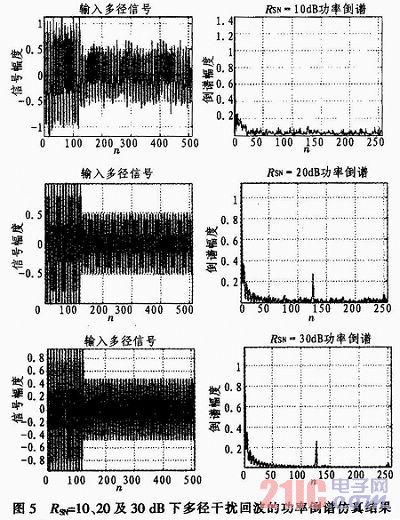
通过计算机仿真可得,信噪比分别为RSN=10、20及30dB情况下,功率倒谱仿真曲线如图5所示。可见,只要RSN足够大(≥20dB)的情况下,可以有效地进行多径干扰信号的分解。通过功率倒谱反运算(求fft、幂运算和ifft等),可获得多径干扰抑制后的回波信号。
4 结论
通过对基于GPS辐射源无源雷达的回波信号的分析,提出了基于自适应抵消原理。采用RLS算法的方法,消除回波信号中的直达信号干扰;采用功率倒谱的方法进行多径干扰信号的估计,在信噪比满足条件的情况下(经仿真实验测试,当RSN≥20dB时)能很好的分解和估计多径信号,并给出了回波信号的恢复方法。本文的研究对基于GPS辐射源的无源雷达的实用研究有一定参考价值。