
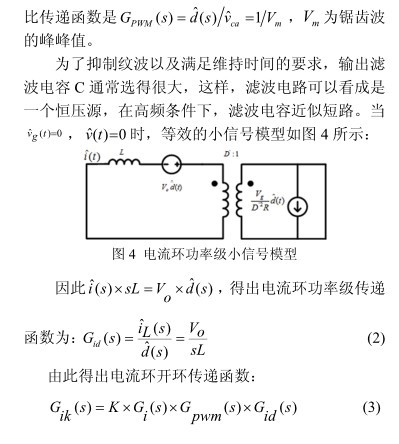
1.引言
在电力电子电路中,非线性开关电源的应用使得谐波电流对电网造成了污染和危害。为提高电网功率因数, 功率因数校正技术得到迅速发展和广泛的应用。近年来,随着数字信号处理技术的飞速发展,以 DSP为核心数字信号处理芯片开始广泛的应用于开关电源中。数字控制较之模拟控制有很多优点,比如控制减少成本,适应性好,开放周期短等,数字控制将是功率因数校正领域今后的发展方向。
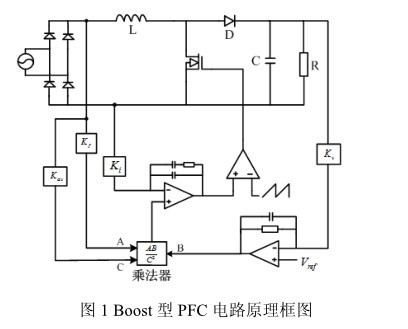
2.PFC 电路模型建立
目前应用最广泛的电路是如图 1 所示以 Boost 为主拓扑的 PFC, Boost 电路具有电感电流连续、 可抑制EMI 噪声,电流波形失真小,在整个输入电压范围内能保持较高的功率因数。 PFC 电路通常采用双环控制,电流环是内环, 控制输入电流波形跟随输入电压波形;电压环是外环,调节输出电压保持稳定。
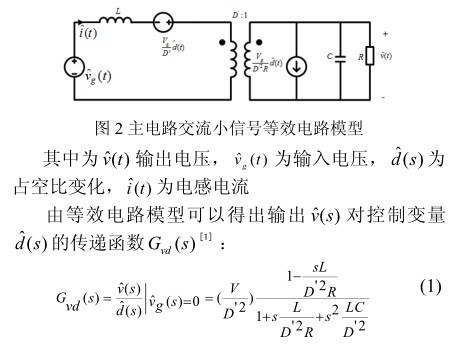
建立小信号数学模型,分析变换器的低频动态特性可以为我们更好的了解电路本质,为环路设计提供依据。就小信号而言,在静态工作点附近用线性关系近似代替变量间的非线性关系,使得各小信号分量之间用线性方程来描述,实现了非线性系统的线性化。
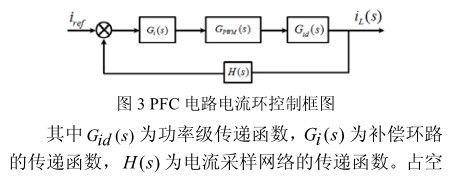
2.2 电流内环模型
电流环是 PFC 双环控制的核心,它控制输入电流跟踪输入电压波形,并与输入电压成比例。图 3 为电流环的框图
2.3 电压外环模型
电压环是 PFC 控制的外环,其作用是稳定输出电压并保持输出电压高于输入电压峰值的电压上。图 5为电压环控制框图

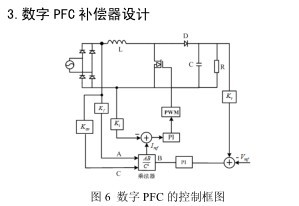
为使 PFC 电路有较好的稳定性和稳态性能,必须对电流环和电压环进行反馈补偿, 通过适当的补偿网络,合理配置零极点, 改善电路特性。在数字控制中,PI 补偿器因其在数字实现上较为简单,且有成熟的工业自动控制应用背景,在数字控制 PFC 电路中被广泛采用。
3.1 数字补偿器的模拟设计方法
数字补偿器最简单的设计方法是把模拟设计的 PI直接转换为数字控制,但在 s 域中零阶保持器和采样器设计比较难,因此常常忽略控制回路中所有的零阶保持器和采样器,然后在 s 域内按照连续控制系统进行设计,最终将模拟补偿器转换为数字补偿器。


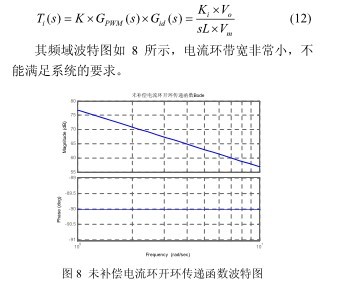
3.1.1 电流环补偿器的设计
电流环通过调节MOS管来使输入电流跟踪输入电压从而得到正弦波形。由于电流基准信号为全波整流信号,电流反馈回路必须有足够的带宽来保证输入电流跟踪上参考信号。
在未加入补偿器时开环传递函数:

在理想情况下输入电感电流能快速准确的跟踪全波整流基准信号, 希望校正后的开环传递函数要满足:
1、低频时直流增益无限大,系统的稳态误差为 0;
2、中频段时尽可能大的带宽以实现快速跟随,以-20dB/dec 的斜率穿越 0dB 的, 并有足够的相位裕度保证系统稳定;
3、 在高频段, 开环传递函数呈衰减特性,抑制高频信号对系统的干扰。对于模拟的 PI 补偿器, 为使平均电流控制的电路稳定,电感电流向下的斜率乘以电路误差放大器的在开关频率的增益须与振荡器的斜波斜率相等此标准给出了电流补偿器在开关频率处得上限值,如果增益太高,电感电流斜率将会比振荡器斜率大,整个环路将会更加不稳定。因此设计原则:
3.1.2 电压环数字补偿器的设计
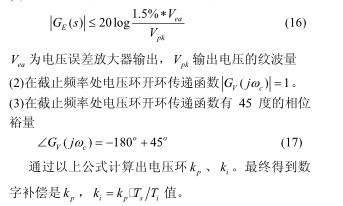
电压环的带宽相对于开关频率太低,所以对带电压回路控制的主要目的是使输入失真达到最小,而不是用来提系统稳定度。由于输出电压中含有的二次谐波量,导致输入电流参考信号中出现三次谐波因此回 路的带宽必须足够小,才能减少输出电容上的线频率的二次谐波以低输入电流的调制量。因此设计原则:
(1)电压补偿器在 100 Hz 处的增益满足
3.2 数字 PI 控制器 Z 频域设计法
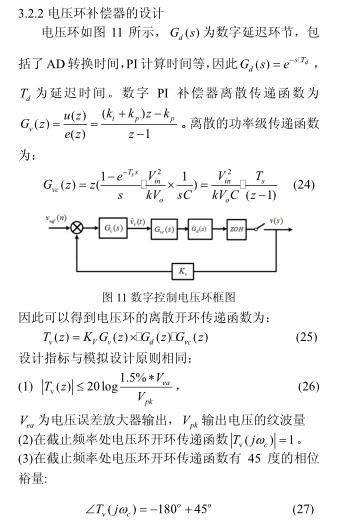
模拟设计方法由于忽略了回路中的延迟和零阶保持器,因此得到的参数并不精确。为获得更好的性能,设计数字 PI 控制器时, 利用模拟控制器的设计经验直接在离散 Z 域进行设计,但存在一定的近似性和不确定性。本文采用后向差分法进行 Z 变换,得到 PI 控制器在 Z 频域的传递函数,直接在 Z 域中进行零、极点配置或响应分析。
3.2.1 电流环补偿器的设计
对于数字控制出现的控制延时可等效为在前向通道串入延时环节,包含了 ADC 转换时间,计算时间、零阶保持器等, 其对数字控制系统的性能有很大影响。由于延时,系统的带宽被减小,在某些情况下,系统会发生振荡甚至失去稳定性。


5.结论
在分析了传统的补偿回来设计的方法的基础上,提出了一种在离散 Z 频域下的数字补偿器的设计方法, 设计了基于 TMS320F2407 型 DSP 芯片的数字控制系统,并进行了实验验证,结果表明该数字方案的可行性。
参考文献
[1] 张卫平 等. 开关变换器的建模与控制.北京:中国电力出版社,2006,01
[2] R.B.Ridlcy. Average small-signal analysis of the boost power factor correction circuit。VPEC seminar proceeding. 1989
[3] 张宇河. 计算机控制系统 (第一版) . 北京: 北京理工大学出版社,2001.6
[4] Manjing Xie . Digital Control For Power Factor Correction. June 2003
[5] L.H. Dixon, High power factor prereg-ulators for off-line power supplies,Unitrode Seminar Proceedings,1990, sec. 12, pp. 1-16.
作者简介:
周升明 男,1986年生,北方工业大学机电工程学院,研究生,主要研究方向为电子镇流器,数字控制开关电源。