
引言
作为一种新型的通信技术,脉冲位置调制(PPM)系统依靠其编码简单、传输效率高等优点,已广泛应用于超宽带移动通信、光通信、机载设备的空地数据链等诸多领域,同时PPM信号的调制和解调对整个通信系统的性能影响很大。
本文主要介绍了在QuartusII集成开发环境下,充分发挥数字设计的优势[1],利用Verilog HDL实现PPM系统,并通过时序仿真结果来验证设计方案。
PPM系统设计
PPM是利用脉冲的相对位置来传递信息的一种调制方式,其基本原理就是将码元信息表示在一个帧时间段内的某个时隙上,若一个码元由n比特组成,该帧时间段含M个长度为t的时隙,则2^n=M。将n比特位编码后对应成某个时隙上的脉冲来传输该码元信息,而该帧时间段内的其他时隙上则无脉冲,从而产生PPM信号。通常帧时间段还包含一个保护时间间隔Tp ,则系统的比特率为n/(M×t+Tp)。图1即为一帧16-PPM信号示意图,其中的脉冲则表示了当前码元(0111)所对应的时隙。
PPM系统的主要原理相对简单,所以可将重点放在代码编写和系统实现方面。设计过程中最重要的是各个模块之间的接口设计,竞争冒险现象的避免等。
为透彻理解PPM系统原理及其本质,简化PPM系统的设计,故在本文所设计的PPM系统中暂不考虑保护时间间隔Tp,同时取M=4,即设计一个4-PPM系统,以便于通过仿真来验证系统性能。

调制系统
通过上述原理介绍,可知PPM信号的调制实际上是一个计数输出脉冲的过程[2],对时隙信号进行计数,当它跟调制数据相等时就在相应的时隙输出高电平“1”,其他时隙均输出低电平“0”。
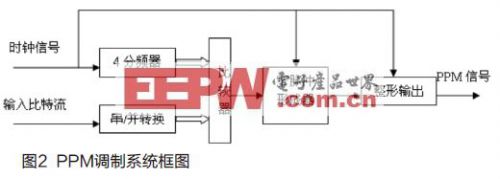
图2是PPM调制系统的框图,主要由串/并转换、4分频器、比较器、窄脉冲形成器、整形输出等5个模块。其中,串/并转换模块主要完成对输入比特流的二进制编码[3];4分频器用于生成帧时间段内的4个时隙;比较器完成对上述两模块输出的高低对应位的匹配比较;窄脉冲形成器用于对比较器的输出做成型滤波,限制PPM脉冲的带宽,从而减小该PPM脉冲对相邻频带内信号造成的干扰;整形电路仅用D触发器实现,主要功能是锁存PPM窄脉冲,与时钟同步,从而避免竞争冒险现象[3~4]。
解调系统
在设计PPM解调系统时,考虑到PPM信号的产生原理,不难发现当输入比特流为连续的“1”串或连续的“0”串时,PPM信号脉冲的间隔保持恒定,为4个时钟周期。而只有在输入比特流从“1”变为“0”或者从“0”变为“1”时,PPM信号脉冲的间隔才会发生变化[5]。所以可根据接收到的PPM信号脉冲间隔的不同来完成解调,判断原输入比特是“1”还是“0”。

根据上述解调模型,可设计PPM解调系统框图如图3所示,主要由时钟提取电路、脉冲位置检测电路、译码器、整形输出等模块构成。其中,时钟提取电路包括时隙同步[6]、帧同步和字同步[7]等,为简单起见,在本设计中省略了时钟提取模块。脉冲位置检测电路主要包括最短脉冲位置检测、最长脉冲位置检测。值得注意的是,在检测最短脉冲位置时,需要移位两个时钟周期后再和原PPM信号相与才能判别出其位置,这是因为当数据信号从“1”变为“0”的过渡阶段,表示“1”的PPM信号前沿和表示“0”的PPM信号前沿间距为2个时钟周期。同样,整形输出模块也是依靠触发器来锁存数据,完成整形。
PPM系统实现及时序仿真
Verilog编码及原理图
根据上述PPM系统的设计思想,基于FPGA的硬线逻辑特性,对各个功能模块进行Verilog编码来实现,并在顶层利用原理图输入的方式完成整机互联。而其中又以窄脉冲成型、为防止信号出现毛刺所作的整形电路、脉冲位置检测电路等为相对重要的模块。
调制系统的顶层原理图如图4所示。
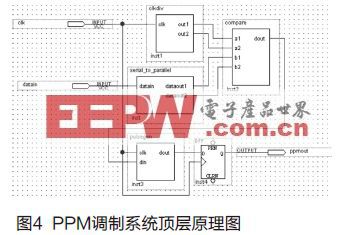
其中窄脉冲成型模块性能的好坏影响着PPM脉冲对邻近信道的干扰情况,在设计该模块时可用触发器与附加逻辑来做脉冲成型滤波,较为简洁,其源代码如下:
/*to generate the narrow pulse*/
module pulsegen (clk,din,dout) ;
input clk,din;
output dout;
reg temp;
assign dout=(~temp)& din;
always @ (posedge clk)
begin
temp<=din;
end
endmodule
解调系统的顶层原理图如图5所示,最长脉冲位置检测模块和最短脉冲位置检测模块统一由时钟的上升沿触发,起到了良好的同步作用。
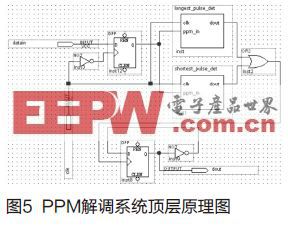
其中最短脉冲位置检测模块相对更为重要,需要精确地移位两个时钟周期,可用串行移位寄存器实现,其源代码如下:
/*to detect the position of the
shortest pulse*/
module shortest_pulse_det
(clk,ppm_in,dout) ;
input clk,ppm_in;
output dout;
reg dout;
reg temp1,temp2,temp4;
wire temp3;
always @ (posedge clk)
begin
temp1<=ppm_in;
temp2<=temp1;
end
assign temp3=temp2&ppm_in;
always @ (posedge clk)
begin
temp4<=temp3;
dout<=temp4;
end
endmodule
时序仿真
对上述调制与解调模块的顶层原理图互联后,在QuartusII平台下选择了Cyclone系列芯片EP1C3T100C6,运行时序仿真后得到整机系统的时序仿真图如图6所示。

通过图6,可以发现该PPM系统的调制与解调部分均满足要求,有着较好的性能。其中输出比特流(dout)相对于输入比特流(datain)有一定的延迟,这个延迟来源于两个方面,一是系统设计中的整形模块等所引入的延迟,二是布局布线后器件及连线的固有延迟。同时通过查看综合报告,得知整机系统总共使用了14个LE,对逻辑资源的消耗较少。
结语
本文提出的基于FPGA的PPM系统的设计方案,在用简明的Verilog HDL代码实现后,对FPGA的逻辑资源消耗较少,而且电路性能较好,时序仿真结果证明了上述结论。对实际通信中PPM系统的应用具有一定的参考价值。在民用飞机机载设备S模式应答机的应答信号的传输过程中,采用的正是PPM体制,笔者将参考本文的设计方案,并做适当的修改,验证其是否可用于S模式应答机的空地数据链中。