
0 引言
过去对逆变器的研究侧重于采用新型高频开关功率器件,从而减小滤波器尺寸,优化输出滤波器设计以实现低输出阻抗等,这些措施能在一定程度上抑制输出波形失真并改善负载适应性,但是还不够理想。为了进一步提高逆变器的动态和静态特性,必须采用新的控制方法。采用重复控制技术,可以较好地抑制周期性干扰,但是,重复控制延时一个工频周期的控制特点,使得单独采用重复控制的逆变器动态特性极差,基本上无法满足逆变器的指标要求。如果将双环控制和重复控制相结合形成复合控制方法,就可以达到较好的效果。但是,这种控制方法要占用较多的运算时间,提高了成本,使系统变得复杂。具有非线性补偿的滑模控制在逆变器的闭环控制中也得到了应用,尽管滑摸控制有着快速的动态响应,对系统参数和负载变化不敏感,但是建立一个令人满意的滑模面是很困难的。
电容电流采样的双环控制可以极大地提高系统的动态反应速度,如果把顺馈控制和逆馈控制相结合,组成复合控制系统,那么可以达到比较理想的控制效果。本文所采用的就是这种带有顺馈补偿的输出电压和滤波电容电流反馈的复合控制方案。
l 逆变器的控制模型
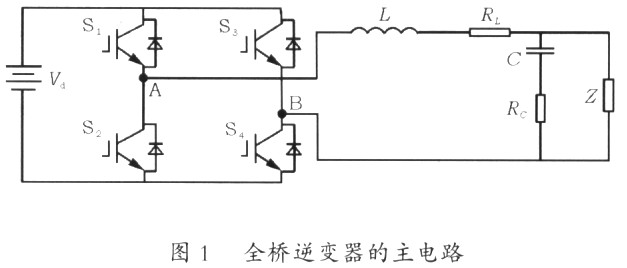
图1是全桥逆变器的主电路图,Vd是直流电压源,S1~S4是4个IGBT开关管,L和C是滤波电感和滤波电容,用于滤除逆变系统中的高次谐波。RL和RC是滤波电感和滤波电容的等效串联阻抗。z是负载,负载可以是纯阻性也可以是非线性等。图1所示的逆变器主电路由于开关器件的存在是个非线性系统。但是,当器件的开关频率远远大于逆变器输出电压的基波频率时,可以用状态空间平均和线性化技术来分析。按照图1所示,可以得到下面的逆变器模型的动态方程:
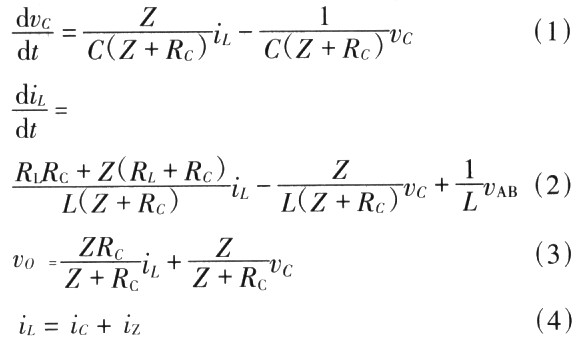
式中:iC,iL,iZ,分别是通过电感,电容,负载的电流。
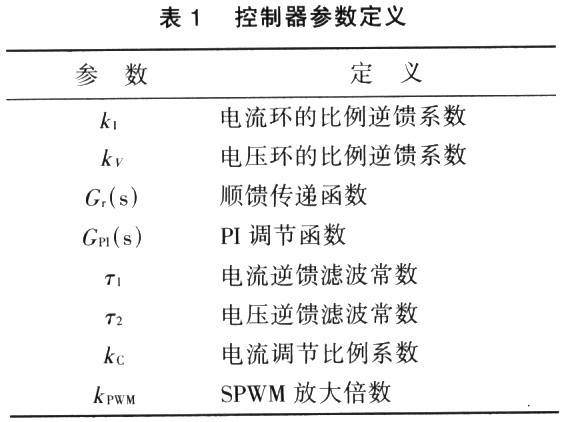
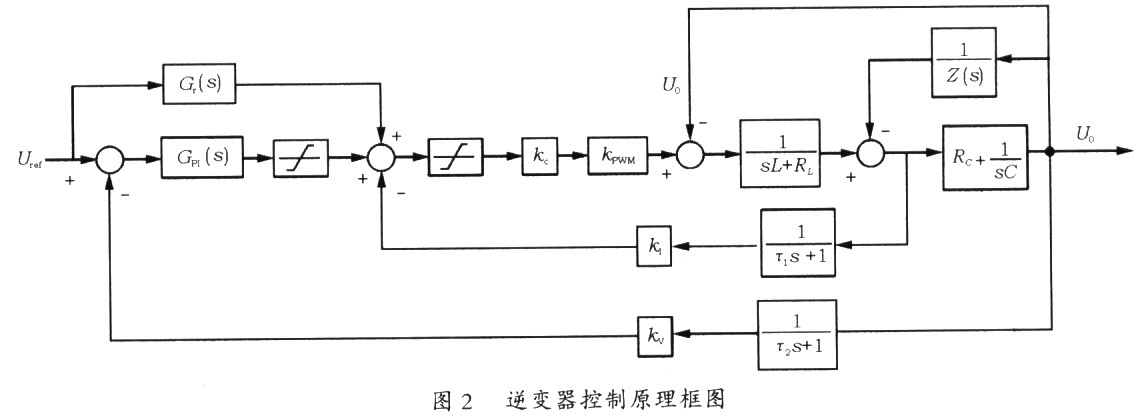
式中:ic,iL,iz上面的动态方程显示了逆变器中各个量的相互关系。在上面建立方程的过程中,逆变器可以看作一个具有恒定增益的放大器。以上述的动态方程为基础,可以设计一个如图2所示的复合控制器。图2中各参数的定义如表1所列。
2 控制器模型的特性分析
在图2控制框图中,电压环作为逆馈瞬时控制外环,电流环作为逆馈瞬时控制内环。逆变器输出电压经过比例环节与参考电压比较,误差经过PI调节后作为电流控制内环的一部分基准,另一部分基准来自于参考电压的顺馈,这个复合基准与来自比例环节的电容电流比较后,再经过比例调节和放大环节就得到了逆变器开关管的输出电压。为了能够更清楚地分析上面的控制原理,现在采用下面的工程化分析方法,即
1)由于电压和电流逆馈环节的滤波常数很小,将其忽略;
2)滤波电感和滤波电容的等效串联阻抗对电路性能的影响较小,也将其忽略;
3)以线性电阻为负载对象分析。
取PI调节函数为![]() 可以对Uref实现误差为零的复现(证明略)。利用上面的分析,可以把图2化简为图3。
可以对Uref实现误差为零的复现(证明略)。利用上面的分析,可以把图2化简为图3。
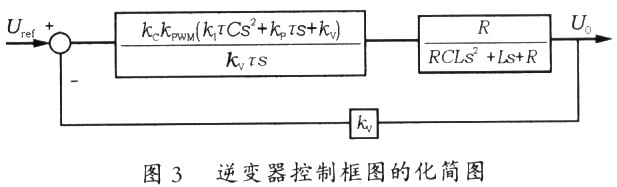
这样,得到逆变器的开环传递函数为:
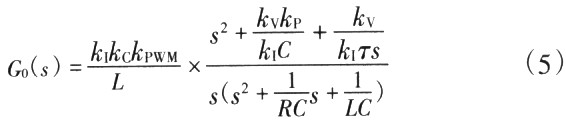
其极点和零点为
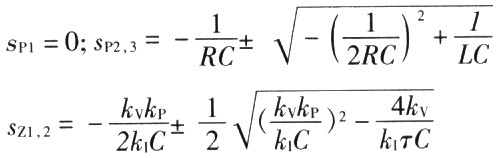
通常 则式(5)可以化简为
则式(5)可以化简为
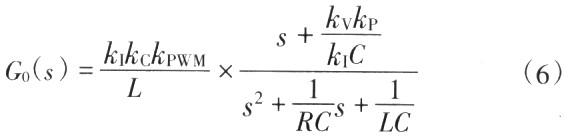
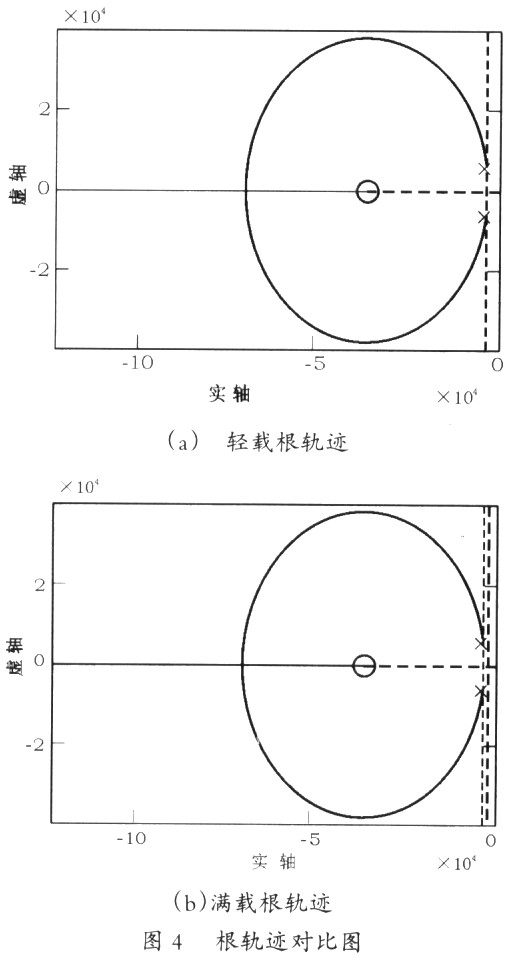
根据上面的函数表达式,作出的闭环根轨迹如图4所示。图4中虚线部分是电压瞬时值反馈控制的根轨迹,实线是本文所采用的复合控制的根轨迹图。图4(a)和图4(b)分别是轻载和满载的轨迹图。从图4中可以看出,本文所采用的控制方案由于在开环传递函数中引入的附加零点,使闭环系统的根轨迹远离虚轴,大大增加了系统的稳定性。而且![]() !萼笋的值比较大,因此可以减少系统的调节时间,又不会造成系统较大的超调。
!萼笋的值比较大,因此可以减少系统的调节时间,又不会造成系统较大的超调。
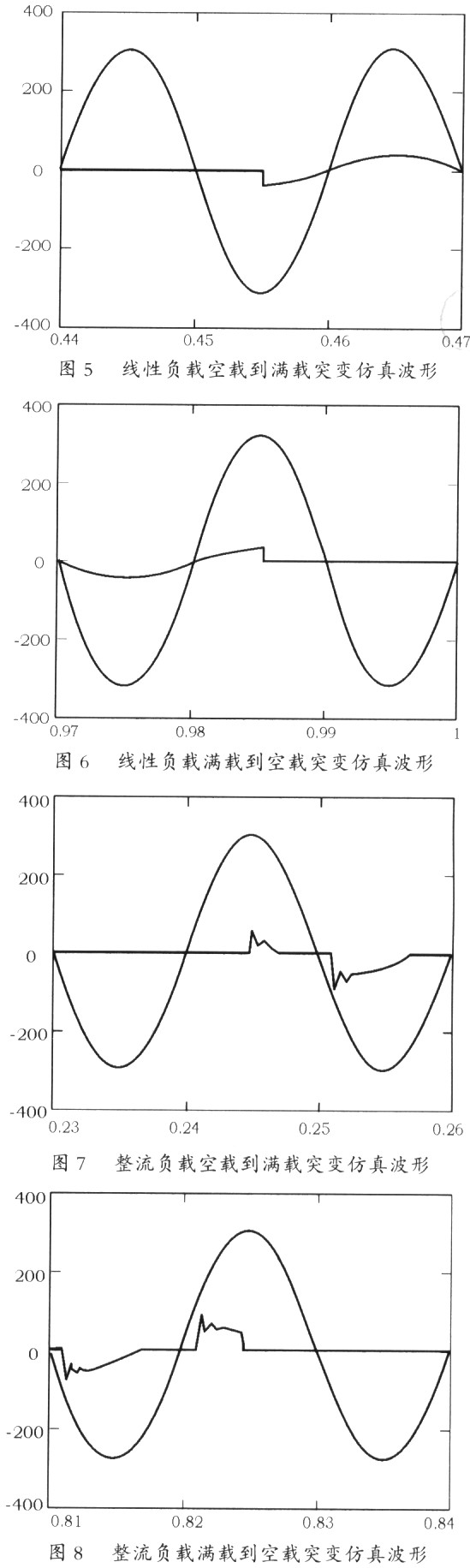
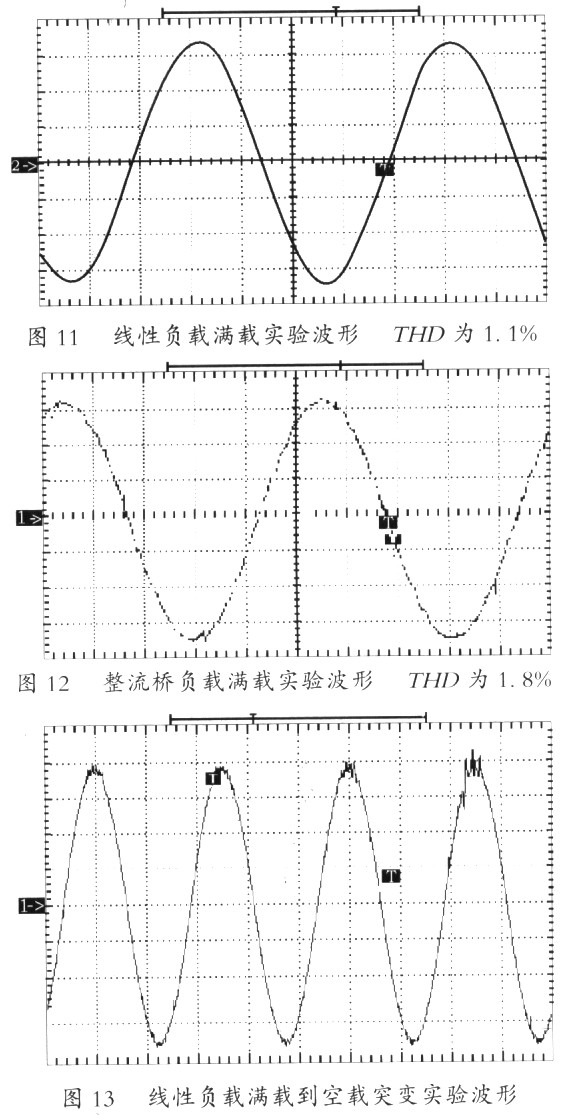
3 仿真与实验
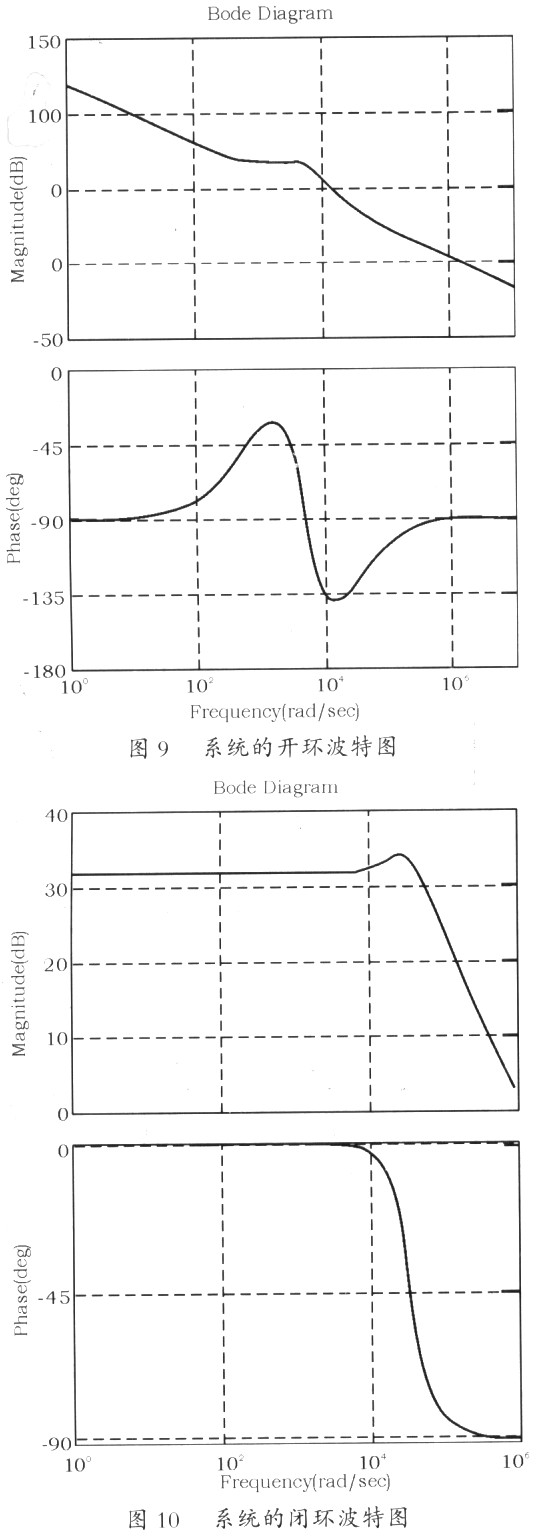
图5~图8是用逆变器验证上面的控制方案的仿真结果。图中的切换都是选在正弦波的波峰处,这种情况代表了切换的最大电压崎变。图中所示波形的动态调整时间小于0.5ms,稳态整流桥负载THD为1%。图9和图10是系统的开环和闭系统的相位裕度大于60℃,为数字控制的滞后,死区效应,滤波器的滞后特性等留有足够的稳定裕量。而且调节时间很快,通带内增益稳定,且相移很小。
4 结语
分析了一个用于逆变器的复合控制技术,控制原理分析以及仿真和实验结果表明,这种控制方法稳定性好,稳态和动态性能优良,是一个值得推广应用的逆变器控制技术。