
摘 要: 深海科学考察所用的调查设备其动力系统往往采用锂电池供电加有刷直流电机的方式, 但锂电池供电存在较多弊端, 且有刷直流电机机械换相部分容易因工作环境的恶劣出现故障, 针对这种情况设计了一种基于STM 32F103微控制器的远程永磁同步电机控制系统, 采用同轴电缆供电, 使系统的运行更加高效更加可靠, 有效延长了作业时间。
深海电机控制系统是深海科学考察、地质勘探、生物资源采集、深海打捞等深海作业中的一项关键技术, 使电机在深海的复杂环境中高效、可靠地运行具有重要的意义。目前, 在我国的深海科学考察中,通常采用有刷直流电机作为动力来源, 水下锂电池为其供电。由于锂电池价格昂贵且需要不时的对其进行充电, 严重影响了有效作业时间, 所以, 采用水上供电即远程控制的方式有很大的实际意义。另一方面,有刷直流电机因长时间侵泡在高压油中, 加上深海作业环境的恶劣, 电刷和换相器很容易损坏。而永磁同步电机利用电子换相代替了机械换相, 不但具有直流电机的调速性能, 而且体积小、效率高。永磁同步电机的转子采用永磁体, 所以省去了励磁电路, 因而具有更高的功率因素。近几年由于新型稀土永磁材料的大量开发和利用, 使永磁同步电机的性能得到极大的提升, 而我国又拥有丰富的稀土资源, 相信永磁同步电机将会得到更广泛的应用。
1 系统控制原理
图1是深海远程电机控制系统的组成框图。能源与数据混合传输同轴电缆既给整个水下系统供电同时又提供了上位机和控制系统通信的线路, 供电电压为1 kV。数据耦合通信模块负责在同轴电缆上分离或叠加经调制过的信号, 而DC /DC 电源负责把同轴缆上的1 kV 高压降为电机的300 V工作电压并产生供控制系统使用的15 V 电压。STM32F103微控制器通过光耦隔离的RS232与数据耦合通信模块进行数据交换, 即接收指令或反馈电机工作状态。由于电机运行时将产生很大的谐波, 干扰同轴电缆上的数据信号, 严重时将导致远程控制出错而引起水下系统的误操作, 所以要求设计的控制系统能很好的响应上位机发出的控制指令。

图1 深海远程电机控制系统组成框图
2 系统设计
2. 1 能源与数据混合传输同轴电缆
能源与数据混合传输同轴电缆是实现远程控制的关键部分, 电缆上的传输电压波形如图2 所示。
混合传输原理就是在发送端将直流电源和数据信号进行叠加, 然后通过同轴电缆实现耦合后的传输, 在接收端再用滤波器将电源和数据分开, 这样只用一根同轴电缆就实现了对控制系统的供电和控制。
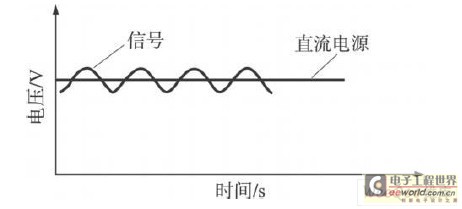
图2 同轴电缆传输信号示意图
2. 2 数据耦合通信模块
数据耦合通信模块主要由数据耦合器和调制解调电路两部分构成。调制解调电路对数据信号进行调制和解调处理以实现信号的远距离传输。数据耦合器实质上就是滤波器, 它是实现混合传输功能的主要部分, 其在整个系统中的作用如图3 所示。
由于高压功率电源和数据信号均要在此通过, 故要求滤波网络耐高压, 且传输功率信号损耗要小、效率高。该滤波网络在同轴电缆的水上和水下两端各有一组, 其结构完全相同。

图3 数据耦合器的作用
2. 3 PMSM 电机
PMSM 按永磁体在转子上安装的方式不同可分为面装式、内插式和内埋式。由于永磁体的磁导率十分接近空气, 面装式的永磁体转子交、直轴电感基本相等, 即L d = Lq, 属于隐极式电机。由于其电感比较小, 故可快速获得感应电流, 且不会产生磁阻转矩, 因此转矩的线性比较好。本设计所用的电机即采用了此结构。
PMSM的定子和普通电励磁的三相同步电机的定子是相似的。如果永磁体产生的感应电动势(反电动势)与励磁线圈产生的感应电动势一样, 也是正弦的, 那PMSM的数学模型与电励磁同步电机基本相同。一台两极PMSM 的结构如图4所示。

图4 两极PM SM 结构图
其中a、b、c轴方向分别为三相相绕组轴线的方向,在abc三轴坐标系下PMSM的电压方程和磁链方程分别为:

关键字:STM32F103 深海远程电机 控制系统
其中rs 是定子绕组的相电阻, Lms和L Is分别是定子绕组的励磁电感和漏电感, r 是转子电角度, Φm 是永磁体产生的磁链。由式( 2)可知, 三相定子的磁链是相互耦合的, 同时它们都是转子位置的函数, 这样就给控制带来了难度。
上世纪70年代西门子工程师F. B laschke首先提出了矢量控制理论来解决交流电机的转矩控制问题,使交流电机特性得到极大的改善。矢量控制采用矢量变换方法, 通过把交流电机的磁通与转矩控制解耦, 使交流电机的控制等效于直流电机。在图2中,利用坐标变换理论把三相静止的abc 坐标系变换成旋转的dq坐标, 其中d 轴为永磁体转子基波磁场的方向, 而q轴顺着旋转方向超前d 轴90 电角度。转子参考坐标的旋转速度即为转子速度。在dq 坐标轴上的定子电压方程和磁链方程简化为:

而面装式PMSM 的电磁力矩可按下式计算, 其中P为电机的极对数:

把式( 4)代入式( 5), 并且已知面装式PMSM的Ld =Lq, 故最终可得电磁力矩表达式为:

从式( 6)可以看出控制定子的q 轴电流即可控制电机的电磁转矩。
2. 4 IPM功率驱动和电流采样模块
本设计的功率部分采用了FAIRCH ILD 公司的FSBB20CH60 IPM模块, 该功率智能模块集成的MOS管最大工作电压为600 V, 最大工作电流20 A, 具有很强的自我保护电路, 并带有一路故障输出。采用功率模块不但减小了系统的体积, 而且比采用功率管加驱动芯片的方案具有更强的可靠性。FSBB20CH60的三相电压输出U、V、W 分别接PMSM 的ABC 相,Nu、Nv 和Nw 是三个半桥的下半桥输出, 分别接电流采样电阻, 阻值为15m#。现以U相为例说明电流的采样方法。如图5所示, Nu 和N 端分别接运放的正相端和反相端, 由于相电流可能流入绕组也可能流出绕组, 因此电压信号是有正有负, 而STM32F103 的ADC 输入电压范围为0 V到3. 3 V, 故需要加偏置电压VOFFSET。电流的计算方法如式( 7)所示。
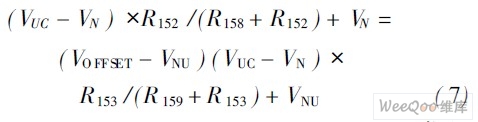
其中取R158 = R159 = 3. 9 kΩ, R 152 = R153 = 1 kΩ, 代入化简可得式( 9), 再把式( 10)代入即可求得电流IU的值。
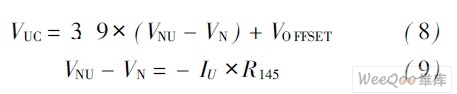
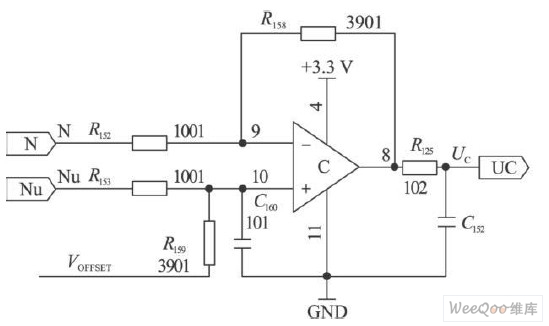
图5 电流采样原理图
2. 5 光耦隔离RS232
为防止电机控制系统因高压击穿进而损坏数据耦合通信模块, 在STM32F103微控制器和数据耦合通信模块之间采取了光耦隔离措施。光耦隔离RS232的原理图如图6所示。隔离芯片采用4N35,由于光耦器件的速度限制且所需传送的数据量较小, 故RS232的通信速率设定为9600波特率。

图6 光耦隔离RS232
关键字:STM32F103 深海远程电机 控制系统
2. 6 STM32F103微控制器
ST公司的STM32F103控制器采用了ARM 公司最新的Cortex M3内核, 哈佛结构上实现1 25DM IPS /MH z, 3级流水线并带分支指令预测, 采用Thumb 2指令集, 最高工作频率可达72MH z。STM32F103片上集成了一个高级定时器TIM1, 能够输出六路互补带死区的PWM波, 并且具有输入打断功能。当功率器件上出现过流时使用打断功能来关闭PWM 输出, 保护功率器件。电机控制软件流程图如图7所示。
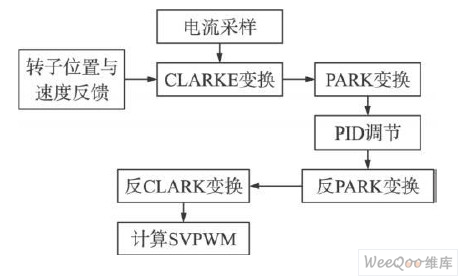
图7 电机控制软件流程图
2. 7 DC /DC及电源管理模块
DC /DC电源把同轴电缆上的1 kV 功率电压降为电机的300 V 工作电压并同时产生供FSBB20CH60功率模块使用的15 V电压, 该电压为其集成MOS管的门极驱动电平。电源管理模块则使用LM7805 和LM1117, 把15 V 电压进一步降低, 产生供STM32F103微控制器及控制系统中其它器件使用的3. 3 V 电压。
3 系统测试
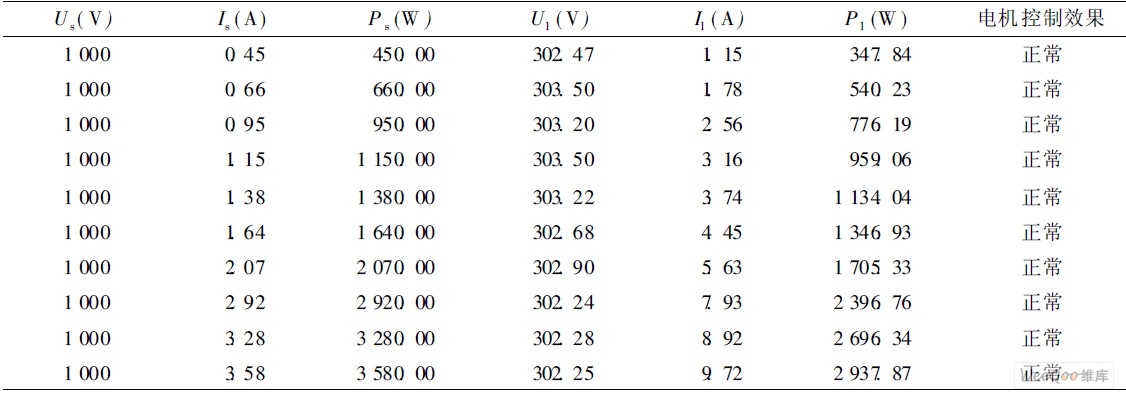
水上部分的电源采用高性能的稳压直流电源, 以减少纹波干扰, 输出电压为1 kV。电机负载逐渐加大, 实验数据如表1所示。其中Us、Is 和P s 分别为稳压直流电源的输出电压、电流及功率, U1、I1 和P 1 分别是DC /DC 模块的输出电压、电流及功率。实验结果表明, 从空载到接近额定功率范围内, STM32F103通过光耦隔离的RS232能够正常的接收上位机发送的起停、加速减速指令, 电机运行良好, 可见电机运行时不影响同轴电缆上的正常通信, 符合设计要求。
表1 负载逐渐加大时的电机控制情况
4 结束语
本文使用意法半导体公司的最新ARM Cortex-M3 微控制器STM32F103 控制PMSM 电机,STM32F103具有高速双AD、高级定时器等电机控制所必须的电路, 且具有较高的工作频率。同时利用数据与能源混合传输技术, 实现了既对深海动力设备供电又能进行远程控制, 克服了使用锂电池供电的诸多弊病。
这种设备已经成功的应用在了我国科学考察船“大洋一号”上, 实践证明, 比传统的方法更具灵活高效, 大大增加了科考作业时间, 减少了设备维护次数, 具有很好的应用前景。