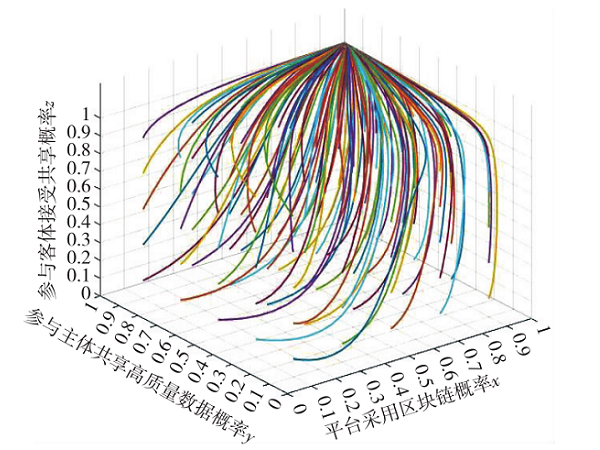
数字供应链下区块链技术采纳的三方演化博弈分析[其他][其他]
发表于:2026/3/10 下午4:45:06
基于内容引导异构双解码器的息肉图像分割[人工智能][其他]
发表于:2026/3/10 下午4:17:27
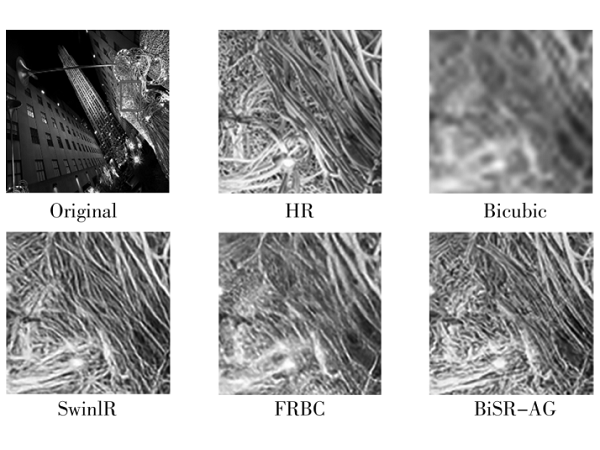
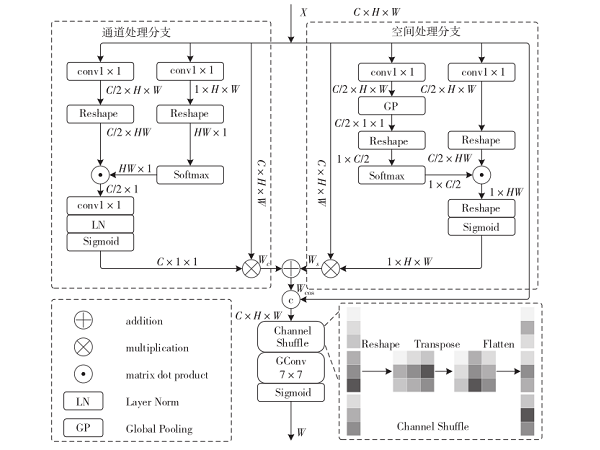
基于注意力信息关注与渐进梯度约束的二值化超分辨率网络[人工智能][其他]
发表于:2026/3/10 下午4:10:32
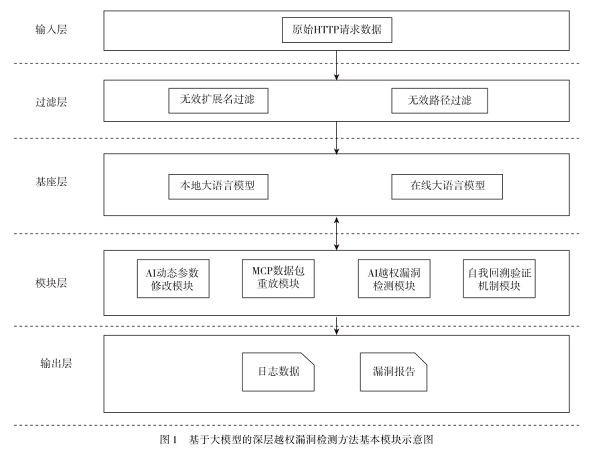
基于大模型的深层 Web 越权漏洞检测方法[通信与网络][信息安全]
发表于:2026/3/9 下午5:22:58
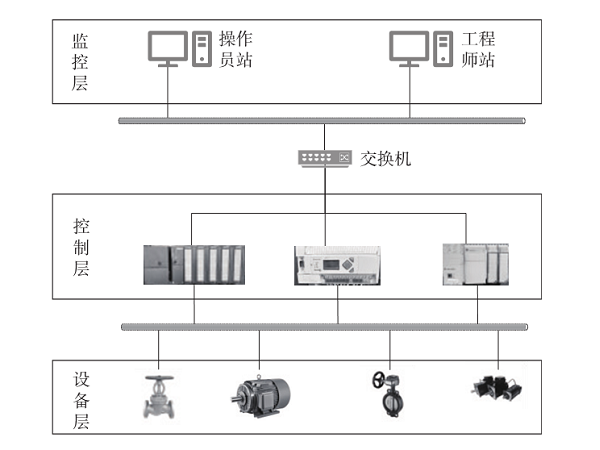
融合深度特征与强化学习的工控协议模糊测试方法[人工智能][通信网络]
发表于:2026/3/9 下午5:05:22

基于内定标数据的机载合成孔径雷达成像处理[通信与网络][航空航天]
发表于:2026/3/3 下午4:25:30
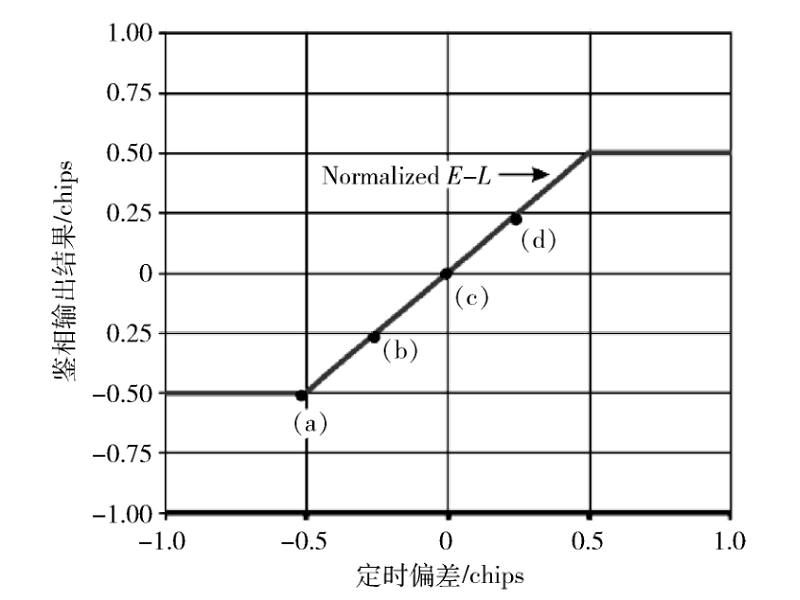
载波相位测量在突发通信测距中的应用[通信与网络][通信网络]
发表于:2026/3/3 下午4:19:22
基于OCR技术的航空导航故障诊断系统设计[通信与网络][航空航天]
发表于:2026/3/3 下午3:50:16