
汉字NAVTEX接收机是一个调谐在490/518kHz的能够自动接收并打印汉字P英文两种形式的航行警告、气象信息和紧急信息的装置。它是海上人命安全公约规定的船舶必须装备的一种无线电设备。当前的NAVTEX系统接收功能主要是由模拟器件组成的硬件电路来完成,而且接收机受体积所限,滤波器很少,其抗干扰分辨性能相当有限,对工作频带内的窄带干扰无能为力,模拟电路异常的复杂,难以实现提高设备的性能和增强设备的功能。在这里提出基于DSP的新型NAVTEX接收机的设计。采用DSP技术和软件无线电技术,实现数字滤波解调与自检等功能,方便地提高了设备的性能和增强了设备的功能,并详细进行了算法研究和DSP实现及实验结果。
NAVTEX接收机的工作原理与信号特点
信号特点
NAVTEX系统通信线路所使用的频段有中波(518kHz和490kHz)或中短波(4209.5kHz)。它先是进行2FSK把数据信号变成音频信号,其中心频率为117kHz,当输入数据为高电平时,2FSK信号的频率为1.615kHz,反之,2FSK信号的频率为1.785kHz。然后用这个音频信号去调制490kHz(或者其他频率)的射频,通过无线信道传输到接收端。信息在传输过程中,一方面受到信道衰落的影响,另一方面受到噪声的干扰。通信性能的优劣很大程度上取决于接收机的性能,而信道特性不理想及信道中噪声的存在很大程度上直接作用于接收端。
接收机工作原理
汉字NAVTEX接收机包括接收天线、射频接收单元、信息处理单元、打印单元、显示单元、电源这几部分,它的原理框图如图1所示。
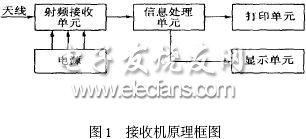
信号经天线接收以后送到射频接收单元,在射频接收单元完成信号的解调。解调后的数字信号送入信息处理单元。在信息处理单元里完成纠错编码、译码等功能。然后由打印单元打印出来。操作过程的响应由显示单元来实现。
新型NAVTEX系统接收机的设计
本设计主要改进了接收机的射频接收单元,使其数字化,使电路简单,能够方便的提高设备性能和完善设备的功能。当前使用的NAVTEX接收机的模拟电路异常复杂,要达到需要的精度使接收机占用的体积过大,并且对性能的提高和增加新的功能难以实现。本设计使NAVTEX接收机小型化、模块化、数字化和软件化。
硬件设计:
当传输汉字的NAVTEX信息的时候一般在490kHz或4209.5kHz的频率上传输,而英文的NAVTEX信息载频为518kHz。对于490kHz和518kHz的信号可以直接接收经APD转换送入DSP进行处理,对于4209.5kHz频率的中短波要先下变频至490kHz,然后做同样处理即可。
硬件设计主要包括模拟前端的设计、APD转换、DSP处理单元、控制单元和信息处理单元,主要框图如图2所示。

模拟前端和信息处理单元的设计和当前的NAVTEX接收机一样,在这里也不多述。
DSP处理单元是新型NAVTEX接收机设计的关键,它接收控制单元的控制命令,然后进行匹配滤波、放大、信道滤波、信道均衡、定时提取、解调。还要产生自检信号完成自检功能。信道噪声是影响接收机误码率的一个重要因素,对数字信号在接收端进行匹配滤波可以使得信噪比达到最佳。定时提取与载波回复是接收机中最为关键的部分,它主要完成最佳抽样点的捕获,收发码元频差的跟踪、获取频波频率和调整载波相差。在这里可采用数字锁相环来实现。由于信道的非线性畸变和线性畸变,在接收机中需要加入均衡器来实现对失真信道的补偿。在DSP处理单元产生2FSK的自检信号,用来完成自检功能,检验接收机的接收信道工作是否正常。当前的自检电路主要是由74HC4060及外围电路组成,在这里直接在DSP中产生自检信号然后有控制单元决定是否送回输入端进行自检,完成了自检功能。输入的信号解调以后输出到信息处理单元,结束信号接收过程。
算法实现
在本设计中自检信号的产生可以在中断中完成,滤波、解调在主程序中完成。主程序的流程图如图3所示。
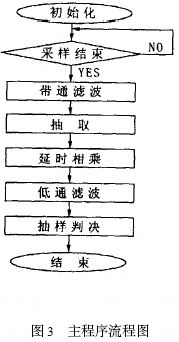
为了完成信号的接收,需要对信号进行滤波、解调、放大和自检时输入信号的产生等多项功能。由于它受DSP运算速度的限制,它必须有DSP能够实时运行的计算有效的算法。
自检时输入信号的产生
自检时输入信号为2FSK信号即移频键控,它的基本原理是:当传输的数据为0时发送信号cosω1t,当传输的数据为1时发送信号cosω2t。所以产生自检信号的关键是产生正弦P余弦波形。在这里利用数字振荡器,用迭代方法产生正弦信号。原理比较简单在这里就不详述。
信号的解调
NAVTEX系统采用的是2FSK调制,FSK解调有相干解调和非相干解调,由于相干解调要求设置与发送设备中的高频载波同频同相的本地参考载波,使设备复杂,因此在这里采用了一种新的非相干解调算法:正交自延时FSK解调算法。
该算法的原理图如图4所示。
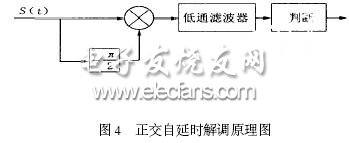
NAVEX系统的2FSK信号表达式为:
S(t)=cos[(ωc±δw)•t+φ](1)
S(t)与其自延信号S(t-τ)的乘积为:
cos[2•(ωc±δw)]•t-(ωc±δw)•τ+2•φ]+cos[(ωc±δw)•τ](2)
令τ满足ωc•τ=π/2,则(2)式经低通滤波以后为:±sin(δw*τ)
这样就可以根据滤波结果的符号判断发送信号的值:负号表示发送信号为0,正好表示发送信号为1。
由于τ是小数倍延时,所以还要通过一个单零点的FIR滤波器来实现。滤波器的差分方程为:y(n)=X(n)+βX(n-1),β可以计算出来。
该信号的波特率为100Hz,采样率为3400Hz,则在每一个波特率周期内的采样点数为34。
设S,DT1是连续存储器位置变量,且令:
DT1=cos[(ωc±δw)•(n-1)T+φ]
DT=cos[(ωc±δw)•(n-α)T+φ]0<α<1
则有:DT=S+βDT1
2FSK解调算法的流程如图5所示。
LPFOUT低通滤波输出;
PJMX包络检波器的判决门限;
SADAT当前波特率周期内采样点的数据估计;
SADCT当前波特率周期内采样点的计数;
BFDAT前一个波特率周期的数据估计;

STWDDSP送入MCU的状态字;
DCT设定的数据转变发生的条件;
CNTR根据它的值判断是不是对BFDAT取反。
结论
本设计误码率10-3以下,满足NAVTEX系统技术指标的要求。在此设计的基础上还可增加多模无线电导航功能,使其同我国现有的Loran-C导航系统、北斗导航系统构成全方位的无线导航系统。同时还可以利用软件化体系结构使其智能化的处理安全信息、导航信息,有了更大的灵活度。