
基于北斗的轮履复合式清扫车*
2023-02-22
来源:电子产品世界
*基金项目:沈阳航空航天大学大学生创新创业训练计划项目(X202210143008)
本文引用地址:http://www.eepw.com.cn/article/202302/443559.htm
1 前言
现有智能垃圾车一般没有配备卫星导航装置,不能实现全自主行进功能,是智能化垃圾车难以实际应用的重要因素之一。
北斗卫星导航系统是我国自主建设、独立运行的卫星导航定位系统,系统能提供时间和空间基准,以及与位置相关的实时动态信息,将北斗系统导入垃圾清扫机器车中,符合国家将北斗卫星全行业植入发展的科技战略和保护环境的基本宗旨,也是改善社会公共服务和提高人民生活环境水平的重要举措。
表1 基于北斗的轮履复合式清扫车各功能模块概述

2 系统总体方案设计
系统功能模块包括:中心控制模块、北斗路况检测模块、北斗导航定位模块、自主动态避障模块、工作行进模块、垃圾捡取模块,各模块功能简介见表1。
根据上述分析,本项目主要实现功能如下:
1)本车采用北斗导航定位弥补不足,规划出多种线路,进行择优选择;
2)采用自主避障模式保证人员与车辆安全,利用北斗卫星对周围环境人员密集度的实时检测,避免大规模人群;
3)用轮履复合结构有效应对多种复杂环境,3 种工作模式的适时切换,可通过绝大部分复杂地形。
3 主要功能模块设计
3.1 清扫车中心控制模块
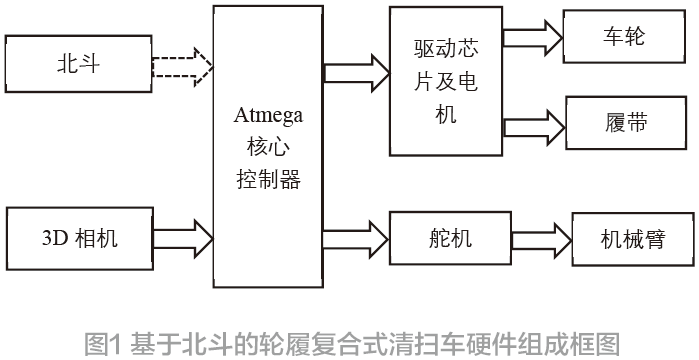
清扫车硬件组成框图如图1 所示,图中的中心控制模块对北斗和3D 相机传递回来的信息分析处理,之后对工作行进模块以及垃圾捡拾模块进行控制。
基于功能需求、成本和资源丰富性考虑,清扫车中心控制模块采用Atmega 为核心控制器。Atmega 具有高性能、低功耗的8 位AVR 微处理器,两个具有独立预分频器和比较器功能的8 位定时器、比较器,使得其在图像处理上有更大优势,便于基于VSLAM 技术构建清扫车所在区域的三维地图。
3.2 北斗路况检测模块
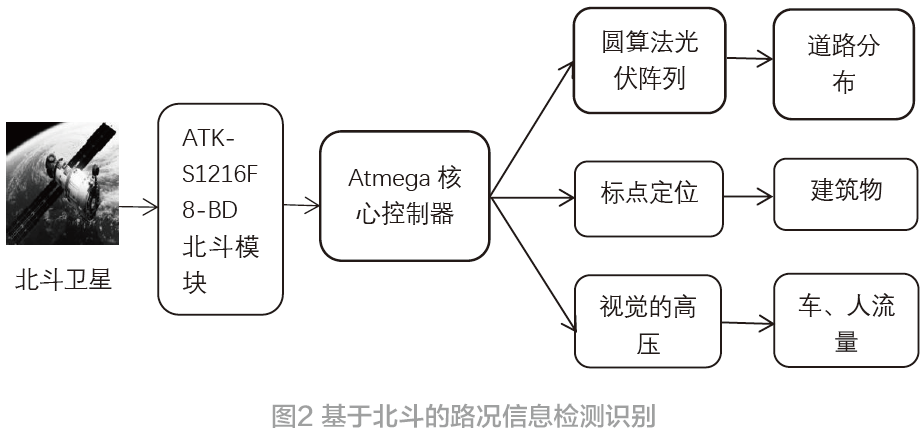
北斗卫星可以采集一定范围内的路况信息,通过ATK -S1216F8-BD 北斗模块将数据传输到Atmega 控制器中。系统在其与北斗导航系统信号传输的同时将地理位置传输到中心控制模块,并通过数据存储相关模块进行短期的地理位置的数据存储,最终将实时的地理位置数据传输到控制中心的数据处理系统终端。
后Atmega 控制器采用圆算法的光伏阵列、标点定位、视觉的高压方法检测识别不同的路况信息。路况信息检测识别过程如图2所示。
1)检测道路分布情况
使用圆算法的光伏阵列法,首先建立道路模型、城市模型和定位子系统,扫描大致路况,然后构建数学模型,采用圆算法对道路的分布情况进行检测,使清扫车可以得到可行进的道路,避免清扫车在道路上乱行。
2)检测识别建筑物
使用标点定位法,首先用栅格法建立路况的模型,其中用小方格代表所检测的环境,并对环境矩形建模。接着建立道路上高大建筑物、树木等数学模型,根据模型进行训练,检测识别出建筑物,避免发生危险。
3)检测车、人流量
使用视觉高压法,北斗卫星具有自动化视觉检测定位子系统,根据全局搜索与区域细分检验相结合的原理,进行投影变换。可对车流量、人流量密集的道路进行检测,当一些车流量、人流量密集的时候,清扫车可以暂时排除此道路。
3.3 导航定位模块
导航定位模块分为两个部分:北斗定位和自主规划最优路线。
1)北斗定位
利用北斗卫星的定位技术将清扫车出发点的地理位置、终点的地理位置、清扫车实时位置相比较,通过北斗导航定位中的二维定位法,确定位置信息的经纬度。同时采用圆算法的光伏阵列法,将从出发点到终点的所有路径进行整合,为下一步进行路线规划打好基础。
2)自主动态地规划最优清扫路线
采用栅格法构建清扫车行进的路线模拟图,从所有由出发点到终点的清扫路线中,结合实时路况拥堵情况,选择出清扫时间最短的最优路线。
如图3 所示,假设清扫车要清扫A 位置到B 位置的所有道路,图中白色区域为要清扫的道路,黑色区域为建筑物、圆环区域为红灯、斜杠区域为拥挤路段, 其中一个小格代表的实际距离为500 m。由于清扫车在建筑物拐角处要进行拐弯,可根据清扫车要拐弯的数量计算出所有可能的路线数量S 为:

式中n 为拐点数。清扫车由A走向B要经过14 个拐点( 经过建筑物的数量),所以清扫车有S = 105 条路线可供选择。理想情况下,即当没有红灯、道路并不拥挤的情况下,经过拐点数量最少的道路即为最短路线,清扫用时最短。但是若出现道路拥堵等特殊情况,按理想路线行驶并不能省时节能。因此本项目在规划路径时,结合北斗卫星检测到的实时路况,自主动态的调整行驶路线。
如图4 可知,当存在红灯和拥挤时,清扫车在建筑物②左上角处拐弯然后在建筑物⑧右下角处拐弯再在建筑物⑬右上角处拐弯,最后在建筑物⑭左下角处拐弯,共需要经过27 个小格,为最优路线。采用栅格法将城市道路转化为数学模型,通过计算,分析清扫车的工作时的车速。清扫车的行驶速度应在3~20 km/h,清扫车根据路面的实际情况来调整车速。清扫路线模拟图如图6 所示。图中深黑色箭头,在没有经过红灯和人群路段时会加快车速。例如,箭头经过路线为27 小格,代表实际距离为13.5 km。此时为节约时间保证清扫干净,车速将控制在15~20 km/h。所以所需要的时间为0.675~0.9 h。在工作途中遇到行人、车辆会停止避免发生危险。例如,图6 灰色箭头所示,途中经过红灯、人群拥堵路段,清扫车会降低车速。箭头经过路线为31 小格,代表实际距离为15.5 km。车速应保持在8~15 km/h,避免发生意外。其中等待红灯的时间为30 s、经过人群车速为3~8 km/h。所以所需时间为2.66~5.225 h。

图3 清扫路线示意图

图4 清扫路线模拟图
3.4 自主动态避障模块
在清扫车工作过程中,清扫车应对随时出现的人或物体采取及时、精确、自主的避让措施,这就要求清扫车能够对位姿实时改变的人或物体进行分析,并进行自主动态避障,为清扫车在所处实时变化的环境下的工作安全提供保障。
对比几种在二维平面中进行测距实现避障的策略,本设计选用3D 相机作为采集信息的视觉传感器,利用3D 相带有的测距功能,采用VSLAM 技术,通过构建三维地图的方式搭建清扫车周边的环境地图,相比其它距离传感器而言,应用3D 视觉传感器更能获取足够丰富的图像信息。
VSLAM 处理流程如图5 所示。通过VSLAM 处理相机采集的多帧图像来估计自身的位姿变化,而后通过累计位姿的变化计算出清扫车与人或物体的距离,并进行地图构建与全局定位;采用图像处理技术进行闭环检测,即采用边缘描述法和体积描述法描述VSLAM 构建地图中的人或物体的几何特性,并对目标位姿进行数据标注;对经由闭环检测得到的信息,由核心控制器对所构建的三维地图中的物体的几何特性信息、位姿信息进行分析比对和优化处理,完成全局轨迹和地图的构建;最后进行自主动态避障决策,实现清扫车的自主动态避障。

3.5 面对复杂地形的行走模式自主切换
1)履带模式
履带模式采用履带接触地面,车轮附着在履带两侧。履带模式特点为行进平稳,行进速度较为缓慢,重心低,附着系数大,具有良好的抗侧翻和抗滑坡性能,同时还具有转弯半径小的机动性,爬坡能力强等优越的越野性能,属于全地形的作业机械。
2)车轮模式
车轮模式采用车轮接触地面,传动杆伸长以抬高车体。车轮模式特点为行进速度较快,效率高,车轮可180 度调节故其方向调整灵活度高,机动性强。适用于较为平坦的路面以及水洼等需要抬高车体的情况,因其高机动性能也适用于人员较为密集的场所。
3)轮履复合模式
轮履复合模式采用车轮与履带的同时作用,传动杆伸缩自身长度以改变车轮与履带间距。轮履复合模式特点为可实时调节车辆重心,保持车身稳定性,车轮履带相互作用,可弥补各自缺点。适用于台阶、楼梯等复杂路况。
4 结束语
本文针对垃圾清扫车自主规划清扫路线这一特殊要求,在自主避障研究的基础上与北斗卫星相结合,提高了自主清扫能力。并且对复杂地形进行了分析,对车体结构进行改良,效果良好。
参考文献:
[1] 蒋勇.地面清洁机器人结构及控制系统设计[D].南京:南京理工大学,2018.
[2] 李延斌,牛雷,佟贺.基于GPS的智能车自动驾驶系统的研制[J].电子产品世界,2018,25(11):61-63,50.
[3] 冉冬东.轮履切换型道路垃圾清理机器人的设计[J].工程科技Ⅱ辑,2021,40(5):42-44.
[4] 李雪艳.智能扫地车系统设计与研究[J].机电信息,2015(33):179-180.
[5] 许俊勇.移动机器人全景vSLAM研究[D].上海:上海交通大学,2008.
[6] 尹韬儒.无人驾驶垃圾清扫车的设计与北斗导航定位系统应用[J].中国新技术新产品,2016(16):19-20.
[7] 张明路,李敏,田颖,等.轮履复合被动自适应机器人设计与参数分析[J].机械科学与技术,2019,38(2):198-204.
(本文来源于《电子产品世界》杂志2023年2月期)
更多信息可以来这里获取==>>电子技术应用-AET<<
